
Rangliste
-
ScooterCenter Alex
Members15Punkte179Gesamte Inhalte -
lukulus
Members5Punkte4.724Gesamte Inhalte -
Brosi
Members4Punkte19.644Gesamte Inhalte -
Schrottpresse
Members4Punkte2.777Gesamte Inhalte



Beliebte Inhalte
Inhalte mit der höchsten Reputation am 11.01.2018 in allen Bereichen anzeigen
-
Als erklärter PK-S Liebhaber bin ich selbst ja auch auf der Suche nach brauchbaren Teilen und daher wurde dieses Projekt bereits vor geraumer Zeit angeschoben. Bis die Temperaturen also wieder soweit angestiegen sind, dass man die feinen PK-S Damen aus ihrem Dornröschenschlaf wach küssen kann, sollte der Kantenschutz für eine der schönsten PK's wieder zur Verfügung stehen. Muster zur Prüfung der Passform sind in der Fertigung. Den Kantenschutz wird es dann in silbern und schwarz geben.15 Punkte
-
Erst blaue Plakette für das Jahr. Zwei werden noch folgen4 Punkte
-
4 PunkteSo Seepferdchen ist erstmal klar zum einpassen in die olle Piaggiobox.
 4 Punkte
4 Punkte -
[OT] Von gewinnorientiert bei zumeist einigen 100 Zugriffen je Video finde ich etwas daneben. Der Aufwand ist nicht zu unterschätzen, jeder so gut er kann & will. Damit verdient er sich sicherlich eine goldene Nase, also los, wer es besser kann, soll es tun - oder vielleicht auch nur mal die WIKI hier überarbeiten - aber damit läßt sich wieder kein Geld verdienen. Die FMP-Videos sind sicherlich für einige Leute, die gerne bunte bewegte Bilder schauen, ganz gute Anleitungen und Anregungen. Sind denn die SIP-Videos so viel besser? Oder irgendwelche Amis gibt es doch auch noch...? Ansonsten: Ich finde es schön, das @freakmoped Erkenntnisse aus anderen Welten (Facebook & Co.) hier einstellt und zugänglich macht, bzw. Infos sammelt und streut. Zugegeben, die Schreibweise ich etwas schräg - aber leute die nur klein schreiben und ohne punktundkomma nerven auch manchmal - und wenn jemand keine Umlaute auf der Tastatur hat, ist das auch anstrengend zu lesen. Ist doch egal, wer es lesen möchte, kann das machen, wer nicht, kann die betreffenden Leute ja auch ausblenden. Mich nerven diese Komplett-Post-Zitate tierisch. @dirchsen - wäre der Aufwand größer gewesen, alles davor und danach zu löschen, anstatt einen Teil rot einzufärben? Hier etwas ausgeschweift: Das müllt die Topics tierisch voll - insbesondere, wenn eine schöne Baudoku mit 20 Bildern und viel Text komplett zitiert wird, um dann nur einen "" drunter zu setzen. Was soll das? Musste ich mal loswerden. [/OT]3 Punkte
-
3 PunkteDer 50er minarelli hatt ganze arbeit geleistet... Das waren 50min auf der cross piste... zahnschmerzen gibts jetzt ja keine mehr, wenn keine da sind...3 Punkte
-
3 Punkteder Gayenne ist ja nur der dümmliche Heeresführer einer ganzen Reihe von absurd dekadenten unzeitgemäßen Blechmonstern.3 Punkte
-
3 PunkteMoin Vesposi!!! Der TM ist nun endlich fertig !!! Am Wochenende lasse ich den endlich mal laufen !!!




 3 Punkte
3 Punkte -
Papier am Kopf geht besser nicht!! ich würde ne 2 Fußdichtung bei legen dann bist so auf 1.1 mm Quetsche. Bedüsung hört sich gut an. Die HD ist wohl was groß u so 135 passt2 Punkte
-
Wollt ihr euch sonst mit dem ganzen dummen Gelaber in ein österreichisches Psychologenforum o.ä. verpissen, dann könnten wir uns hier der Technik von BigBox-Auspuffanlagen für Vespa-Roller austauschen.2 Punkte
-
2 PunkteIch finde es beeidruckend, wie man im Sprung noch fest davon überzeugt sein kann derjenige zu sein, der das Stöckchen hält.2 Punkte
-
2 Punkte
-
Rissprüfung durch anstarren? Steht das so in der DIN?2 Punkte
-
2 Punktefürs echte Gelände, aber halt nicht für die Autobahn.. und ja, trinkfest ist der auch. (wenn er denn mal fertig wird )
 2 Punkte
2 Punkte -
2 PunkteAuch schön ist der im Erstlack befindliche, in der Trittbrettsicke angepunktete Rundstahl...2 Punkte
-
2 Punkte@Skawoogie Wenn schon Geländewagen dann oldschool. Den fahre ich seit letztem Jahr (auch im Gelände). Über den Verbrauch reden wir mal besser nicht.
 2 Punkte
2 Punkte -
2 PunkteServus die Herren der schnelleren SS180. Ich muss für diverse Kunden den original Zylinder tunen. Dazu lasse ich ein paar Spezialteile herstellen. Diese möchte ich auch hier anbieten: - 1mm Fussdichtung für längere Überströmzeiten; € 12.00 - Kolben 66.5 (PX200) von Grand-Sport mit lasergerschweisstem Kolbenfenster: € 130.00 - modifizierter PX200 Zylinderkopf: Quetschkante ca. 1.2, Verdichtung 10.5:1: € 150.00 Adapterkit für Vergaser und Luftfilter in Vorbereitung. Bei Interesse einfach PM. Ich werd die Teile demnächst bestellen und im Februar bearbeiten. Gruss Ralph2 Punkte
-
2 PunkteIch denke, da manifestieren sich die Bedürfnisse einer alternden Gesellschaft. Das Durchschnittsalter steigt hierzulande seit Jahrzehnten rasant an, das merken auch die Autohersteller. In der Werbung werden SUVs zwar meist als "urban", cool und abenteuertauglich dargestellt, aber in Wahrheit zählen hier vor allem Faktoren wie rückenfreundliches Einsteigen, Bewegungsfreiheit und Komfort. Irgendwie heißt es ja immer, das alte Leute biedere Stufenhecklimousinen fahren. Aber das stimmt inzwischen nicht mehr so ganz. Zu den Fahrzeugen mit den ältesten Fahrern gehören Audi Q3, Opel Mokka und Mercedes GLC. Das Durschnittsalter der Neufahrzeugkäufer liegt bei diesen drei Autos bei deutlich über 50 Jahren. Bei anderen "Sportsutilityvehicles" sieht es kaum anders aus. Das heißt, wenn ihr wollt, dass es weniger SUVs gibt, schafft euch einfach mehr Kinder an, dann baut Opel vielleicht irgendwann wieder einen Manta, anstelle des Mokkas2 Punkte
-
Jetzt bauts erstmal eure Rolle richtigrum ein [emoji23]2 Punkte
-
2 Punkte
-
2 Punkte
-
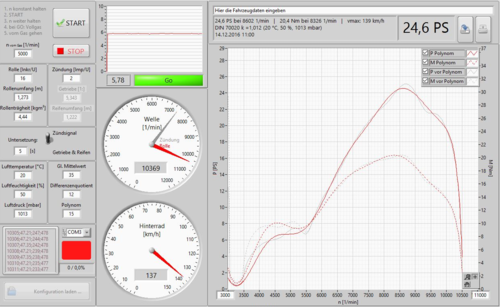
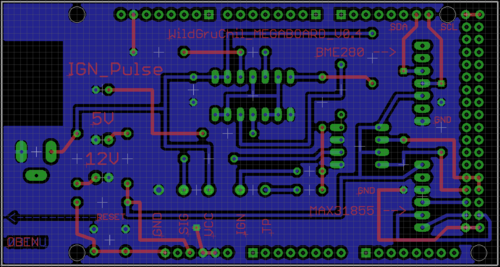
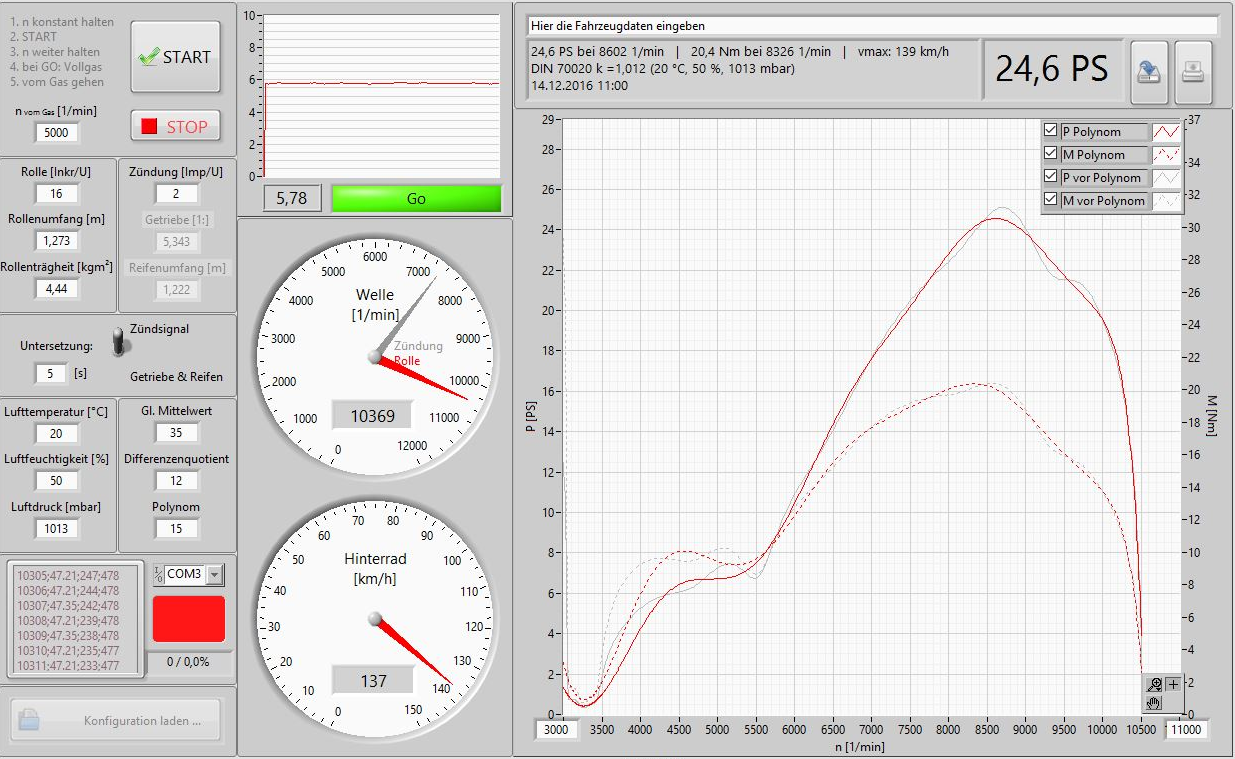
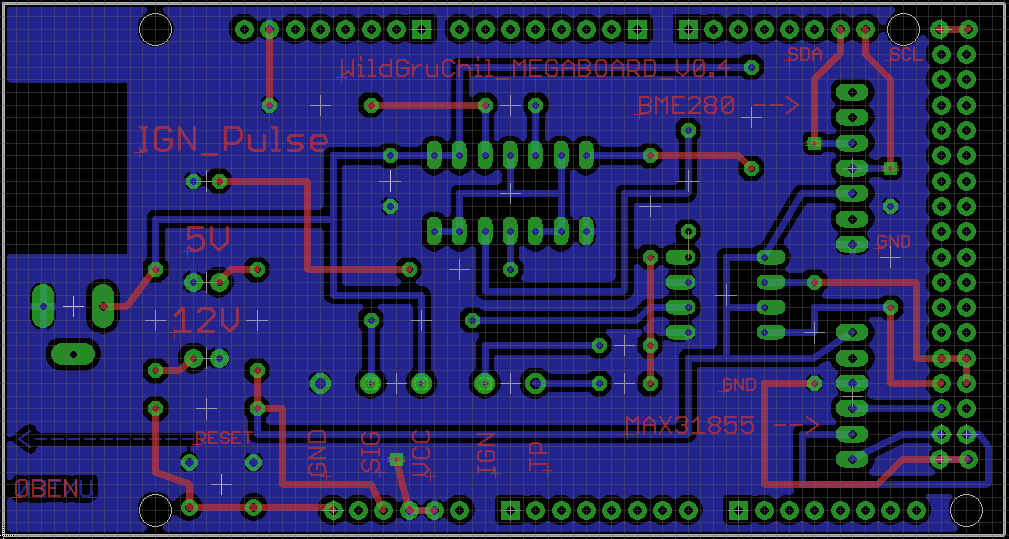
2 Punkte2 PunkteHallo liebe Gemeinde, ich möchte hier unser Projekt vorstellen. Seit nun mehr 2 Jahren tüftel ich an einer sauberen Lösung, Leistung an Rollenprüfständen zu messen und die Ergebnisse in eine Datenbank zu speichern. So gut und stabil der GSF Dyno auch ist, er ist etwas Benutzer unfreundlich und es vergeht immer einige Zeit zwischen Messung und Leistungsdarstellung. Hier möchte ich anmerken, das ich zu keiner Sekunde den GSF Dyno kritisieren möchte. Ich wünsche mir nur eine etwas professioneller ausschauende Software für die Erstellung und Speicherung von Prüfstandsläufen. Angefangen hat alles mit einem Atmega und einem einfachen C Programm. Viele Fehler und viele initiale Hürden habe ich alleine genommen, jedoch kam meine Entwicklung aus Zeitmangel (Test und Entwicklungszeit) zum erliegen. Als ich mich nach einer Pause wieder mit dem Thema beschäftigt habe, kam nach kurzem Aufruf im Forum Wildstyler und Grua dazu. Mit der Hilfe und unermüdlichen Geduld der Zwei ging alles mit sehr großen Schritten voran. Wildstyler übernahm den Großteil der Prüfstandstest und hat alles in kürzester Zeit getestet was wir ihm schickten. Hemmungslos hat er seine Elenor auf dem Prüfstand gequält bis die Kupplung (Partnerlink) weinte (und auch den Geist auf gab). Grua hat die nummerische Umsetzung in Labview, Entwicklung der Oberfläche und Bedienung übernommen. Die Auswertung hat er so nahe am GSF Dyno gehalten wie möglich. Unser gemeinsames Ziel ist eine stabile Software zur Verfügung zu stellen die vom Forum frei benutzt und getestet werden kann. Wichtig ist uns allen Open Source. Die Software läuft stabil und erzeugt wiederholbare Ergebnisse, sie ist aber noch nicht perfekt. Einige Features sollten noch implementiert werden. Wir hoffen, das mit der gemeinsamen Hilfe des Forums eine gute und stabile Software auf dem Niveau eines AVL Prüfstands entsteht. Nun genug des Gesülzes und zur Software. Idee war es eine Microcontroller so zu programmieren, das er mit der Minimalkartschaltung benutzt werden kann. Bei dem aktuellen Programm, handelt es sich um die Minimalausführung (nur Leistungsmessung) mit Debug Features. Wenn sich genug Menschen finden bei denen diese Version gut funktioniert soll sie immer komplexer werden. Messprinzip: Arduino Mega angeschlossen and die Minimalkartschaltung. Der Arduino bekommt in TTL (5V) die Impulse der Rolle und der Zündung. Diese gehen in den ICP4 und ICP5 (Pin 48 und Pin 49). ICP steht für Input Capture Pin. Es ist wichtig das der Arduino nur 5V Signale bekommt. Das geht am einfachsten mit einem Optokoppler der auf die Unteschiedlichen Schaltkreise abgestimmt ist. So wa es uns möglich bei Wildstyler, Grua und mir drei unterschiedliche Prüfsysteme mit unserer Software/Hardware zu benutzen. Dabei handelte es sich um: 12V / 16 Inkremente / leichte Rolle 9V / 24 Inkremente / schwere Rolle 5V/200 Inkremente / mittlere Rolle Der Arduino hat die Aufgabe die Zeit zwischen zwei steigenden Flanken der beiden Eingänge zu messen und diese in einen Ringspeicher zu speichern. Die Werte werden dann über Serielle Schnittelle zusammen mit der Übertragungszeit (Zeit zwischen zwei Übertragungen) an den PC/LabVIEW gesenden. LabVIEW berechnet dann die Leistung und stellt sie dar. Zur Zeit senden wir mit ca 50Hz die Werte an den PC. Das hat sich als guter Wert herausgestellt. Kurz zum Arduino. Wir haben uns für den Arduino entschieden, da es ohne Vorkenntnisse möglich ist, ihn von jedem PC aus zu programmieren. Die USB Schnittstelle dient gleichermaßen als Programmierschnittstelle und Serielle Schnittstelle an den PC. Die Daten der Rolle und der Zündung werden an Labview gesendet. Wir benutzen Labiew , da es nur noch 50€ als Home Version kostet und genau für solche Situationen entwickelt wurde. Eine Implementierung in Java oder C oder was auch immer ist natürlich auch möglich und ausdrücklich erwünscht. Labview ist nur das von uns genutzte Modul. Die Daten können wie gesagt beliebig verarbeitet werden. Benötigt wird: 1x Arduino Mega 1x Labview 2014 oder neuer 1x Prüfstand mit Rollensensor 1x Minimalkartschaltung (nicht dringend notwendig wenn man weiss was man macht....) Aufbau: ACHTUNG Signale müssen aufbereitet bzw. auf 5V gebracht werden. Ich habe den LTV827S (Optokoppler) mit 180 Ohm zwischen Signal und Eingang und 10kOhm am Ausgang gegen GND. 1. Zündungssignal aus Minimalschaltung an Pin 48 2. Rollensignal aus Sensor (oder Minimalschaltung) an Pin 49 Ablauf der Messung: In Labview müssen die bekannten Daten von Zündung, Massenträgheit usw. eingetragen werden. Desweiteren muss der korrekte COM Port eingestellt werden. 1. das Programm starten. (Weisser Pfeil oben im Menu) 2. Rollen und Rolle auf konstante Drehzahl bringen. 3. Die Messung Starten (Großer Knopf mit Start) 3.1. Labview startet die Übersetzungsermittlung. Ist dieser Prozess fertig erscheint ein Grünes GO und es kann gemessen werden. 4. Vollgas 5. Vom Gas gehen Nach erreichen der maximalen Drehzahl und Reduzierung der Drehzahl wird die Messung automatisch beendet. Die Messung wird gespeichert und die nächste Messung kann starten. Still to come: Wir sind gerade noch dabei einige Verbesserungen zu implementieren. Dazu gehören: 1. Implementierung eines BME280 für die Wetterdaten. 2. Implementierung eines Fussschalters für "Messungsstart" und "nächste Messung". 3. Implementierung von Lambdamessung 4. Implementierung von Temperaturmessung ----> MAX31855 breakout ca. 15€ Ich möchte ausdrücklich nochmal darauf hinweisen, dass das Programm noch nicht perfekt ist und das vielleicht einige Lösungsansätze besser oder Prozessorfreundlicher gestaltet werden könnten. Mit dieser Version möchten wir dem Forum eine stabile Basis zur Verfügung stellen, auf die nun gemeinsam aufgebaut werden kann. Open Source heisst hier das Sprichwort. Ich persönlich bin zur Zeit durch Hausrenovierung etwas stärker eingespannt, werde aber weiterhin an dem Programm arbeiten. Ich denke, das wir gemeiensam in kurzer Zeit eine sehr professionelle Software/Lösung zum messen von Leistung haben werden. Ich möchte mich nochmal bei Wildstyler, BugHardcore und Grua bedanken. Ohne die Drei wäre die Software jetzt nicht da wo sie ist und das Projekt wäre wahrscheinlich in eine meiner Schubladen gelandet. Das ganze Paket kann von GitHub runter geladen werden. Im Zip befinden sich alle Dateien und eine Docu. Alle neuen Entwicklungsstände werden dort veröffentlicht. https://github.com/gruaGit/WildBugChilGru/releases !---------------------------------EDIT-------------------- WildGruChil_Shield_v4 mit allen Anschlüssen für den BME280(wattenrott) und MAX31855 (adafruit) von wattenrott. 12V und 5V Variante !---------------------------------EDIT--------------------
 1 Punkt1 PunktSo nach gefühlten 20 Minuten erwärmen und dem Dreiarmabzieher hat’s dann Peng gemacht und es war runter Danke für die (brauchbaren) Tips!
1 Punkt1 PunktSo nach gefühlten 20 Minuten erwärmen und dem Dreiarmabzieher hat’s dann Peng gemacht und es war runter Danke für die (brauchbaren) Tips! 1 PunktWomit wieder mal bewiesen wäre, dass Sportlichkeit wohl mehr von persönlicher Einstellung, als von einer bestimmten Baureihe abhängig ist.1 Punkt1 PunktEin bisschen Platz wäre noch. Braucht man ja nur einen anderen Ansauger bauen. Aber so wie am Bild kann es da durchaus Probleme geben.Gerade bei Vollast.Würde ich in der Form nicht fahren wollen.1 Punkt1 Punktdes glaub ich ned....da brauchst ja ne Stoßdämpferverlägerung von 15cm1 Punkt1 PunktIch denke damit können wir jetzt hier endlich dicht machen. 100% Erfolg ohne einen Nachrücker, wenn auch mit Verzögerung. Bis Ende Oktober, es sei denn ich soll für euch ein Eiersuchen veranstalten....1 Punkt1 PunktSprich es aus....man kann mit einem Panda halt den größten Aal am Fischmarkt abholen.1 Punktich hab noch nen megadella im keller für t5, glaub ich. falls der auch drunter soll. *hab ihn gefunden, liegt schon im karton.1 PunktDer von dir äußerst subjektiv verbogene Begriff von "korrekt" und die gewinnorientierte Gratis-Werbung für deine "Produktionen", zum Beipiel.1 Punkt1 PunktHatte ähnliche Problematik schon mal, finale Lösung war Polrad ordentlich erhitzen und mit zwei Montiereisen auf Spannung gehen, Welle zum Schluss mit Kältespray runtergekühlt. Hat dann glücklicherweise aufgegeben. Weiterhin viel Erfolg und gutes Gelingen!1 Punkt1 Punktalles klar eigentlich wollten wir ja bei unserer geplanten Rolle mit dem GSF Dyno starten, weil der beim Luk auch gut funktioniert... aber je mehr ich hier lese desto eher wirds diese Softwäre1 PunktUno hat nur 1 Stk. input cature Eingang ICP1. Zum hochgenauen Messen zweier Frequenzsignale (Rolle und Zündung) werden aber 2 Stk. derartige Eingänge benötigt bzw. machen‘s wesentlich einfacher/genauer. Das Projekt wurde auch mit dem Uno gestartet, dann aber aus genanntem Grund bewusst auf Mega umgestellt.1 PunktVielleicht ein alter, nicht mehr üblicher Begriff? Im Bauwesen wurde der Stahl im Beton früher als Armierung bezeichnet, heutzutage als Bewehrung. Ansonsten könnten die nächsten Ansprechpartner jetzt der Hersteller der o. g. Maschine oder ein Maschinenbau-, bzw Verfahrenstechnik-Lehrstuhl sein.1 PunktBald ist das Meltdown. Bekommt ihr das hin bis zum Festival der Lust?1 PunktIch wusste garnicht dass T5Rainer n nachnamen hat! crazy!1 Punkt1 PunktDie Polo-Eigenmarken empfand ich immer als besser was Preis-Leistung angeht als die Louis-Sachen... Es gibt hier in Hamburg einen Louis-Flohmarkt wo die ihre Retouren verramschen, wenn Du da mal durch gelaufen bist wundert Dich garnix mehr. Muss ja einen Grund geben warum ein bestimmtes Paar Schuhe hundertfach Retour geht1 Punktich verstehe nicht ganz was das cayenne bashing soll ? ok, mag nicht jedermanns Sache sein so ein SUV aber wer ihn mag soll ihn doch mögen. was soll diese Intoleranz, ich dachte das GSF ist soooooo weltoffen und flexibel ( so lange es nicht um Automaten geht ) ! manch einer mag nen Tempomat, manch einer findet er müsse doch wohl selbst in der Lage sein den Abstand einhalten zu können, manch einer mag gern rothaarige vögeln, ein andere finden ne rostige Moese abstoßend...will sagen...iss klar ne ?1 Punkt1 Punkt1 PunktBei Beedspeed stehen Nenndurchmesser mit Gewindesteigung für Lambretta und Vespa: https://beedspeed.com/html-pages/LamVespaScrewSizeGuide.htm1 Punkt1 Punktviele von den sachen sind schon in der salsa-ecke, musikalisch, v.a. rhythmisch steh ich total auf triolen und syncopen und v.a. alles was mit der clave funktioniert, weil groove ! puerto rico !! die geilste kubanische Musik machen Puertoricaner. Boogaloo ist ja gerader, eher so wie soul - 4 to the floor + clave, sozusagen der motown der latinos man könnte sagen, das was durch Bob Marley, dem Reggae passiert ist - ist den lateinamerikanischen Musiken durch Santana angetan worden: schlechter Ruf durch Überpräsenz bestimmter Songs ( dort: No Woman , No Cry; hier Oye Como Va ) deswegen an dieser Stelle den Ohrwurm in einer richtig geilen Version von lange vor Santana; 1967 oder 1968 ??1 Punkt1 PunktDanke für eure Meinung und Ratschläge Es bleiben an den Engstellen knapp 2mm nach Dichtung aufzeichnen stehen, das kann beim Zylinder aber noch bisschen weniger werden wenn ich es genau mache Ich glaube ich gehe das Risiko ein (wäre doch sonst langweilig ) und lasse da was drauf legen. Der Macher hat schon einige Motoren gemacht und alle sind unauffällig. @clash1, man sagt ja. Mir läuft das noch etwas zu ruppig, Leistung stimmt. Werde die Tage mal einen RT 195 fahren und mir das anschauen, denke ich muss mich an so einen kolbengesteuerten Lambretta Motor erst noch gewöhnen. Mir wurde bereits eine Mumu ans Herz gelegt, aber dann gehe ich lieber auf einen anderen Zylinder, warum sollte man den Mugelle zerfräsen. Gruß und schönen noch.1 PunktDas wäre doch mal ein Projekt! Wenn ich etwas Kohle hab mach ich das! Leider steigen die Preise für die Cosa auch wieder. Meine hatte ich 2010 für 300€bekommen. Heute unter 800 nur noch selten.1 PunktNa dann will ich auch mal.... Hatte schon vor geraumer zeit eine motorlose pk80s vom heizer. Sprühdosenlackiert in lila met. sollte ursprünglich nen völlig andern farbton bekommen und eigendlich mit 50ccm für meine frau sein. Nach dem ich ein wenig mit verdünnung geputzt hatte kam der olack zum vorschein. Leider hatte einer der vorbesitzer die gute scheinbar mit nem winkelschleifer angeschliffen und ich wollte das so nichn lassen also wurde sie gefüllert und bekam für fast alle teile frisches rot. Motor ist jetzt noch ein kurzhub 102 alu pinasco drin...es liegt aber schon der gute alte 133gg gs polini im keller .....ach ja ist und bleibt ein alltagsroller...... und fahren tu ich sie
1 PunktWomit wieder mal bewiesen wäre, dass Sportlichkeit wohl mehr von persönlicher Einstellung, als von einer bestimmten Baureihe abhängig ist.1 Punkt1 PunktEin bisschen Platz wäre noch. Braucht man ja nur einen anderen Ansauger bauen. Aber so wie am Bild kann es da durchaus Probleme geben.Gerade bei Vollast.Würde ich in der Form nicht fahren wollen.1 Punkt1 Punktdes glaub ich ned....da brauchst ja ne Stoßdämpferverlägerung von 15cm1 Punkt1 PunktIch denke damit können wir jetzt hier endlich dicht machen. 100% Erfolg ohne einen Nachrücker, wenn auch mit Verzögerung. Bis Ende Oktober, es sei denn ich soll für euch ein Eiersuchen veranstalten....1 Punkt1 PunktSprich es aus....man kann mit einem Panda halt den größten Aal am Fischmarkt abholen.1 Punktich hab noch nen megadella im keller für t5, glaub ich. falls der auch drunter soll. *hab ihn gefunden, liegt schon im karton.1 PunktDer von dir äußerst subjektiv verbogene Begriff von "korrekt" und die gewinnorientierte Gratis-Werbung für deine "Produktionen", zum Beipiel.1 Punkt1 PunktHatte ähnliche Problematik schon mal, finale Lösung war Polrad ordentlich erhitzen und mit zwei Montiereisen auf Spannung gehen, Welle zum Schluss mit Kältespray runtergekühlt. Hat dann glücklicherweise aufgegeben. Weiterhin viel Erfolg und gutes Gelingen!1 Punkt1 Punktalles klar eigentlich wollten wir ja bei unserer geplanten Rolle mit dem GSF Dyno starten, weil der beim Luk auch gut funktioniert... aber je mehr ich hier lese desto eher wirds diese Softwäre1 PunktUno hat nur 1 Stk. input cature Eingang ICP1. Zum hochgenauen Messen zweier Frequenzsignale (Rolle und Zündung) werden aber 2 Stk. derartige Eingänge benötigt bzw. machen‘s wesentlich einfacher/genauer. Das Projekt wurde auch mit dem Uno gestartet, dann aber aus genanntem Grund bewusst auf Mega umgestellt.1 PunktVielleicht ein alter, nicht mehr üblicher Begriff? Im Bauwesen wurde der Stahl im Beton früher als Armierung bezeichnet, heutzutage als Bewehrung. Ansonsten könnten die nächsten Ansprechpartner jetzt der Hersteller der o. g. Maschine oder ein Maschinenbau-, bzw Verfahrenstechnik-Lehrstuhl sein.1 PunktBald ist das Meltdown. Bekommt ihr das hin bis zum Festival der Lust?1 PunktIch wusste garnicht dass T5Rainer n nachnamen hat! crazy!1 Punkt1 PunktDie Polo-Eigenmarken empfand ich immer als besser was Preis-Leistung angeht als die Louis-Sachen... Es gibt hier in Hamburg einen Louis-Flohmarkt wo die ihre Retouren verramschen, wenn Du da mal durch gelaufen bist wundert Dich garnix mehr. Muss ja einen Grund geben warum ein bestimmtes Paar Schuhe hundertfach Retour geht1 Punktich verstehe nicht ganz was das cayenne bashing soll ? ok, mag nicht jedermanns Sache sein so ein SUV aber wer ihn mag soll ihn doch mögen. was soll diese Intoleranz, ich dachte das GSF ist soooooo weltoffen und flexibel ( so lange es nicht um Automaten geht ) ! manch einer mag nen Tempomat, manch einer findet er müsse doch wohl selbst in der Lage sein den Abstand einhalten zu können, manch einer mag gern rothaarige vögeln, ein andere finden ne rostige Moese abstoßend...will sagen...iss klar ne ?1 Punkt1 Punkt1 PunktBei Beedspeed stehen Nenndurchmesser mit Gewindesteigung für Lambretta und Vespa: https://beedspeed.com/html-pages/LamVespaScrewSizeGuide.htm1 Punkt1 Punktviele von den sachen sind schon in der salsa-ecke, musikalisch, v.a. rhythmisch steh ich total auf triolen und syncopen und v.a. alles was mit der clave funktioniert, weil groove ! puerto rico !! die geilste kubanische Musik machen Puertoricaner. Boogaloo ist ja gerader, eher so wie soul - 4 to the floor + clave, sozusagen der motown der latinos man könnte sagen, das was durch Bob Marley, dem Reggae passiert ist - ist den lateinamerikanischen Musiken durch Santana angetan worden: schlechter Ruf durch Überpräsenz bestimmter Songs ( dort: No Woman , No Cry; hier Oye Como Va ) deswegen an dieser Stelle den Ohrwurm in einer richtig geilen Version von lange vor Santana; 1967 oder 1968 ??1 Punkt1 PunktDanke für eure Meinung und Ratschläge Es bleiben an den Engstellen knapp 2mm nach Dichtung aufzeichnen stehen, das kann beim Zylinder aber noch bisschen weniger werden wenn ich es genau mache Ich glaube ich gehe das Risiko ein (wäre doch sonst langweilig ) und lasse da was drauf legen. Der Macher hat schon einige Motoren gemacht und alle sind unauffällig. @clash1, man sagt ja. Mir läuft das noch etwas zu ruppig, Leistung stimmt. Werde die Tage mal einen RT 195 fahren und mir das anschauen, denke ich muss mich an so einen kolbengesteuerten Lambretta Motor erst noch gewöhnen. Mir wurde bereits eine Mumu ans Herz gelegt, aber dann gehe ich lieber auf einen anderen Zylinder, warum sollte man den Mugelle zerfräsen. Gruß und schönen noch.1 PunktDas wäre doch mal ein Projekt! Wenn ich etwas Kohle hab mach ich das! Leider steigen die Preise für die Cosa auch wieder. Meine hatte ich 2010 für 300€bekommen. Heute unter 800 nur noch selten.1 PunktNa dann will ich auch mal.... Hatte schon vor geraumer zeit eine motorlose pk80s vom heizer. Sprühdosenlackiert in lila met. sollte ursprünglich nen völlig andern farbton bekommen und eigendlich mit 50ccm für meine frau sein. Nach dem ich ein wenig mit verdünnung geputzt hatte kam der olack zum vorschein. Leider hatte einer der vorbesitzer die gute scheinbar mit nem winkelschleifer angeschliffen und ich wollte das so nichn lassen also wurde sie gefüllert und bekam für fast alle teile frisches rot. Motor ist jetzt noch ein kurzhub 102 alu pinasco drin...es liegt aber schon der gute alte 133gg gs polini im keller .....ach ja ist und bleibt ein alltagsroller...... und fahren tu ich sie




 1 PunktHab mal eine große Plastikspinne in die leere Trommel unserer Waschmaschine gelegt ... ... wusste somit auf die Sekunde, wann meine Frau Wäsche waschen wollte.1 Punkt27.-29.7.2018.........19. RUN AM SEE! bitte eintragen Vagöts God Jogl1 Punkt
1 PunktHab mal eine große Plastikspinne in die leere Trommel unserer Waschmaschine gelegt ... ... wusste somit auf die Sekunde, wann meine Frau Wäsche waschen wollte.1 Punkt27.-29.7.2018.........19. RUN AM SEE! bitte eintragen Vagöts God Jogl1 Punkt




















































Wichtige Information
Diese Website nutzt Cookies und vergleichbare Funktionen zur Verarbeitung von Endgeräteinformationen und personenbezogenen Daten. Die Verarbeitung dient der Einbindung von Inhalten, externen Diensten und Elementen Dritter. Je nach Funktion werden dabei Daten an Dritte weitergegeben. Einige dieser Verfahren sind technisch unerlässlich, andere kommen nur mit Ihrer Zustimmung zum Einsatz, eine Anpassung ist in den die Cookie-Einstellungen möglich. Für Details siehe die Datenschutzerklärung