chili023
Members
-
Benutzer seit
-
Letzter Besuch
Alle Inhalte von chili023
-
Es gibt, Verlängerungen dafür. Muss mal schauen wo ich die gefunden habe
-
Nein da muss das thermoelement direkt dran
-
Gerätemänager ist irrelevant da entweder die Arduino IDE oder Labview das übernimmt. Das ist ok so. Die Klimadaten werden erst bei einem neuen Lauf übertragen. Und das auch nur mit der V1.0. Die kommt heute raus. Zum Test kannst du im Seriellen Monitor der Arduino IDE mal ein e senden. Dann müssten die Daten kommen.
-
Abend. Denke mal morgen kommen die ersten Boards. Wir arbeiten noch an der Docu und laden alles auf Github hoch. Das sollte morgen alles fertig sein. Wartet bitte auf die letzten Versionen der .exe und des Arduino sketches, es hat sich zu der hier veröffentlichen Version nochmal einiges geändert. A.
-
Alle kalibriert. Nach leichter Veränderung der initialisierung des BME hatten diese alle ein konstantes Offset von 50-60mbar zwischen 600 mbar und 1200mbar. Geht alles gleich raus.
-
Ok. Dann sollte das mit ner zweipunkt Kalibrierung an der Höhenrollerolle ja ausreichen. Den Wert schrieb ich dann auch nen Sticker den ich auf den BME280 klebe. Der kann dann in den arduino sketch eingetragen werden.
-
Hmm. Hab gerade mal 12 bme280 getestet. Temp und feuchte sind innerhalb von 1%. 3 zeigten aber wirklich Abweichungen im Luftdruck. Das dann auch richtig zwischen 50 und 80 mbar. Das ist eigentlich inakzeptabel. Ich würde am Montag einen Gefallen bei den Jungs der Höhenrolle einfordern und die bme280 Kalibrieren. Das heißt natürlich das ich erst Montag verschicken kann. @skinglouie weißt du ob es nur ein Offset ist oder ein variabler Faktor?
-
@skinglouie Was meinst du mit kompensation? Die Kalibrierung macht die adafruit Bibliothek.
-
Vor zwei Wochen habe ich nen Blechsatz da bestellt per Email. Angebot kam nach einem Tag. Kommunikation ca.12h Reaktionszeit. Bezahlt per PayPal. Blechsatz nach 3 tagen vor der Haustür. Alles Top
-
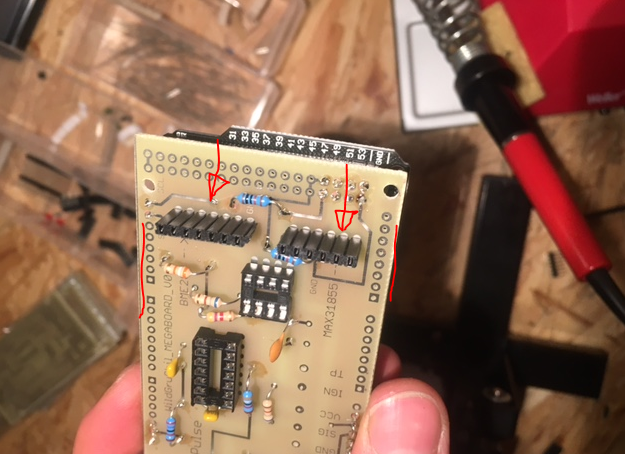
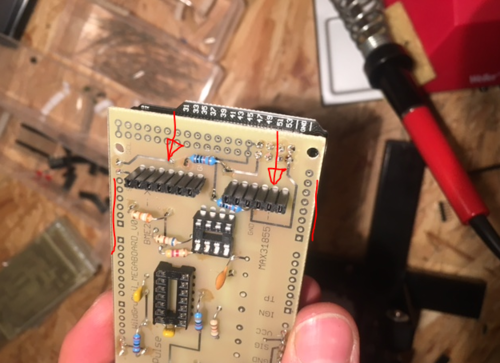
Hallo Thomas. Das thermoelement kommt auf den Max31855 das ist bereits alles integriert und in den aktuellen Boards V0.4 integriert. Die Lambdasonde und deren Anschluss erfolgt über einen der Anlalog Pins des Arduinos. Das kommt aber auf den Controller an. Ich habe den Knödler das funktioniert wunderbar, da der 0-5V ausgibt. Prio jetzt ist aber erstmal dei Platinen fertig z stellen und sie an dei Leute zu verschicken. Ob und wie man einen Fussschalter oder (wie ich es bevorzugen würde) einen kleinen Knopf mit Klettverschluss am Schaltgriff integriert steht noch nciht fest. Softwaremäßig ist dafür alles vorhanden. Angeschlossen werden der MAX31855 (Thermoelementauswerter) auf dem Bild rechts (Pfeil). Lambda, Fussschalter, dann entweder links oder rechts. @JoeHännes wird einen 3D Box entwerfen. Wir müssen mal schauen wo die Anschlüsse am besten passen. TP ist für die Auswertung mit Oszilloskop. Da kommt ein leicht verlängertes Signal raus, damit man es auch mit billigen Soundkartenoszilloskopen gut analysieren kann.
-
Bughardcore, grua. Können wir die v1.0 Veröffentlichen? Bei der Hardware bin ich ein bisschen zurück. Mache aber nachher weiter.
-
Ich hatte mal was änliches. Mal ging es mal nicht. Im endeffekt, war es eine lose Kabelschuhverbindung an der CDI. Ich hatte aber auch sporadische Fehlzündungen. Würde aber definit auf Zündung tippen. Kannst du ne andere ZGP testen?
-
Also die Motordrehzahl brauchst du nur zur Getriebeübersetzungsermittlung. Wenn du die Gesamtübersetzung kennst kannst du auch ohne Messen.
-
Hmm. Kannst du mal ein bisschen genauer werden. Was für ein Motor wer stellt das steuergerät her? Wenn eine Spannung abfällt, wird auch eine Feld aufgebaut. Das kann man auch mit der Kroko oder ner Spule erfassen. Da muss ich aber mal mit unseren Elektronikern sprechen.
-
Kleines Update. Die Jungs @BugHardcore @grua @wildstyler scheinen keine Freunde zu habe, denn die sind unermüdlich an der Weiterentwicklung in Labview dran. Durch einen Einbruch und die Platinenentwicklung habe ich mich etwas rausgehalten aus der Labview Geschichte. Ich möchte jedoch berichten, das es warscheinlich auch schon in der V1.0 möglich sein wird mehrere Kurven zu vergleichen. Wir nähern uns mit großen Schritten eine professionellen Prüfstandssoftware. Ich bin sehr gespannt auf die ersten Tests mit dem Shield. Ich werde versuchen bei der Herstellung Gas zu geben. JoeHännes entwickelt gerade eine 3D Box für die Kombo Arduino und Schield. Über Fortschritte werden wir hier berichten. Trotz der Fortschritte möchte ich nochmal an alle die appelieren, die Kenntnissen über LabVIEW oder AVR's haben sich zu melden. In Labview gibt es noch viel zu tun. Der Arduino läuft zwar problemlos aber der Code ist halt gänzlich auf meinen Mist gewachsen. Vielleicht kann der noch effizienter gestalltet werden.
-
Mir ist leider nicht klar was eine Stabzündkerze ist. Meinst du eine im Stecker integrierte Zündspule?
-
Platinen sind da. Alle die eine der ersten Chargen bekommen wurden von mir angeschrieben. Wer noch eine will und keine Nachricht hat, bitte melden. Ich plane Montag bzw. Dienstag zu veschicken.
-
Die Platinen sollten heute ankommen. Die erste Charge geht hoffentlich am Freitag raus. Details/Bezahlung per PM. P.s. Die Software Version V1.0 ist fertig und bereit für den Release. Wir bereiten alles vor und posten es sobald die Boards raus gehen. A.
-
Die Verlustleistung könnte man auch bestimmen. Das kann man als Programm implementieren. Steht jetzt aber erstmal nicht auf dem Plan. Ich stimme da Bosst zu. Vielleicht könnte man ja auf den Zustand des Getriebes zurückschließen !?
-
Ok wenn ich drüber nachdenke ist Erot= 1/2 x J x omega^2 Und Omega = v/r. Dann kürzt sich das raus.
-
Aber doch im Quadrat bei der Trägheit und nur linear beim Umfang. U=pi x r x 2 J=1/4 x m x r^2
-
150 km/h war bei mir gar kein Problem. Lief ganz ruhig. Da muss die Rolle natürlich entsprechend gewuchtet sein.
-
Weiss nicht wie schwer meine Rolle ist (Leihgabe), aber als Jesco mit seiner ü 45PS Macht bei mir war, haben wir die Läufe im 4ten Gang gemacht. Im 3te drehte der zu schnell hoch und es fehlten 3-4 PS. Im 4ten geht es sehr gut und redundant. Was Jesco dazu noch sagte ist, dass bei Läufen über alle Gange die maximale Leistung im 3ten anliegt. Wieso kann ich mir persönlich nicht ganz erklären. Aber vielleicht kann das ja jemand erläutern.
-
Nein da spricht nichts dagegen.
-
Jeder der ein Board bekommt erhält auch meine Telefonnummer. Bei Problemen, stehe ich gerne mit Rat und Tat zur Verfügung.