chili023
Members
-
Benutzer seit
-
Letzter Besuch
Alle Inhalte von chili023
-
OK stimmt in Zeile 16 bitte von: bool debug = false; auf bool debug = true; ändern und nochmal kompilieren und hochladen.
-
Das letzte Bild ist aber nicht der debug sketch!? Schau mal bitte im Gerätemanager unter Schnittstellen nach. Dort kannst du die COMx für den Arduino deaktivieren und wieder aktivieren. Als nächstes bitte mal versuchen die VISA Treiberfür Labview runterladen und zu installieren. Ich weiss aber nicht ob das notwendig ist bei der EXE, aber einfach mal versuchen. Da du kein Labview hast kann man leider den DAQ Manager von Labview nicht beutzen um zu schauen ob die Schnittstelle von Labview erkannt wird. Als nächstes kannst du mit einem Terminal Programm schauen ob du dort auf die Schnittstelle zugreifen kannst. Und nicht vergessen: "Have you ever tried to turn it of and on again?....."
-
erstmal ja. Wenn aber noch PLatz drauf ist nach integrierung der Lambdasonde, und der eingänge für die Thermoelemente, dann soll das samt Klinke wieder drauf. Damit man zum Abgleich auch den GSF Dyno benutzen kann.
-
Wie gesagt ich gehe das nochmal alles durch und wenn alles passt lade ich die komplette eagle Datei hoch und alle Belichtungspläne. Will jetzt auch noch eine Version für einseitige Platinen machen. Bestückubgsliste kommt
-
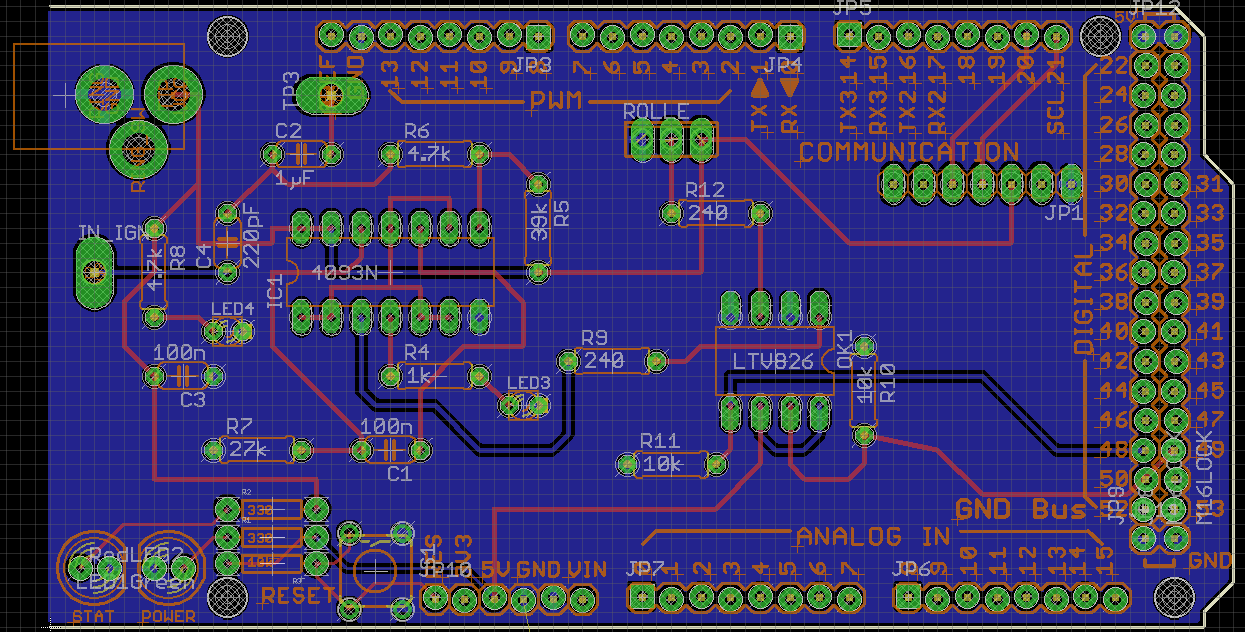
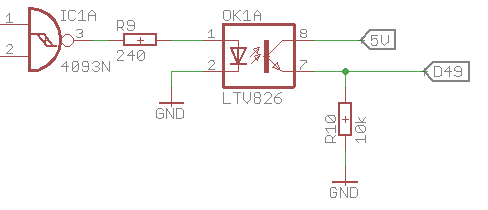
Zu meiner großen Verwunderung ging das erste Board doch schneller als gedacht. Ich werde es morgen mal ätzen und bestücken. How to, kann ich auf der Rückfahrt schreiben. Aber generell: Minimalkart anzapfen (pin3 des HEF4093) Von da mit einem Widerstand in den Optokoppler (Schaltplan siehe open). Vom Optokoppler in den Arduino (Pin 49). Das gleiche für den Rollensensor mit korrektem Widerstand (Pin 48 des Arduino). Und erstmal mit dem Seriellen Monitor der Arduino Softwäre schauen ob alles funktioniert. In Labview passiert noch gerade viel durch @BugHardcore und @grua da würde ich noch ne kleine Weile warten.
-
@sf freak Ja das stimmt 827. Aber den hatte ich nicht in meiner eagle libary.
-
Also da muss ich meinem Freund zustimmen. Aber zurück zum Thema. Da die Frage aufkam wie bei der Minimalkartschaltung angezapft werden muss, hier ein Beispiel für die Zündung und 12V Versorgung der Minimalkartschaltung.
-
Es gibt DEBUG sketches für UNO und MEGA. Die sind in der V0.182 enthalten. Die simulieren einen Prüfstandslauf.
-
Also das kommt ganz darauf an wie viel Volt deine Schaltung bekommt und welche Optokoppler du benutzt. Bei 12V 240Ohm Bei 9V 180 Ohm Bei 5V 100 Ohm Abgriff Zündsignal an Pin 3 des HEF 4093
-
nein 10 k zwischen GND and Optokuppler auf der ArduinoSeite. Zündung mit Minimal glaube ich 150Ohm.
-
Ich weiss nicht genau worauf du hinaus willst. Gesendet wird: Counter (zur Plausibilierung);Frequenz zwischen zwei Transfers an den PC; Frequenz Signal 1; Frequenz Signal 2
-
TIFRx sind die Flags die dem Prozessor sagen: Jetzt ISR ausführen. TimerInterruptFlagRegisterX
-
Das ist der ISR (Interrupt Service Routine) von ICP5 ISR(TIMER5_CAPT_vect) { if ( ErsteFlanke5 == 1) { Messung5[j] = 0; StartTime5[j] = ICR5; ovlCAPTst5[j] = ovlTIM5; if ((TIFR5 & 1 << TOV5) && (StartTime5[j] < 0x8000)) // evtl. Ueberlauf T1 noch offen? { ovlCAPTst5[j]++; // nur, wenn capture-int + overflow-int gleichzeitig ! } ErsteFlanke5 = 0; } else { EndTime5[j] = ICR5; ovlCAPTend5[j] = ovlTIM5; if ((TIFR5 & 1 << TOV5) && (EndTime5[j] < 0x8000)) // evtl. Ueberlauf T5 noch offen? { ovlCAPTend5[j]++; // nur, wenn capture-int + overflow-int gleichzeitig ! } Messung5[j] = 1; ErsteFlanke5 = 1; TIFR5 |= (1 << ICF5); j++; //-------End of ringsize if (j == ringsize) { j = 0; } } }
-
Die ICP sind Input Capture Pins. Das sind 2 von 5 Interrupt Pins. Wenn hier ein Signal > 2 V anliegt wird der Interrupt ausgelöst. Das Programm springt dann in die Interrupt Service Routine und führt den jeweiligen Code aus.In dieser Interrupt Service Routine fülle ich einfach einen Ringspeicher für die jeweiligen ersten Flanken. Sobald Timer0 (glaube ich) übergelaufen ist werte ich den Ringspeicher aus und schicke das Ergebnis an die Serielle Schnittstelle.
-
@Motorhead Du kannst ganz normal die Minimalkarte anzapfen, wie gesagt ich empfehle aber optokoppler. Ich habe morgen 2x 5h Zugfahrt vor mir. Ich hoffe, das ich da das Arduino shield mit allen Komponenten fertig bekomme.DAs könnte sich dann jeder ätzen lassen und bestücken. Ich werde versuchen, falls ich fertig werde mit dem Board, 5 Stück am we zu ätzen. Die kann ich dann nächste Woche bestücken und verschicken. Nach den Test können wir dann über Verbesserungen und ne kleinserie sprechen.
-
OK. Verstehe. Damit könnte man dann auch das Recalc VI in das Mess VI integrieren.
-
@BugHardcore Das hatten wir schonmal versucht. Da gab es ein anderes Problem, das man das VI dauernt neu starten musste. Aber das kann mit dem nicht schließen der COM Schnittstelle zu tun haben. Ereignisstruktur = Case structure ?
-
@Springrace Mario Das wäre das teil. das gibt es bei Conrad aber für 25€. @All: Bitte mal eure benötigten Spannungen für Sensoren und Co posten.
-
@gs-gani Du hast natürlich recht. Com schnittstelle bleibt offen. Das werde ich ändern. Vielleicht fällt jemanden ja noch eine elegante Lösung zu den Start Problem ein. Ich denke, das folgendes passiert: Beim Start des VI, sendet der Arduino bereits. Das bedeutet, dass das erste Telegram mittem drin anfängt. Somit fehlen Werte und die Nachricht kann nicht verarbeitet werden. Die erste Nachricht wird somit nicht geräumt und der Puffer läuft voll. Wir haben schon einiges versucht, um das ganze softwaremäßig stabil zu machen, leider alles ohne Erfolg. Mit Fussschalter klappt das natürlich ohne Probleme. Die Serielle Schleife in Labview ist noch auf meinem Mist gewachsen, es muss aber eine elegantere Lösung geben. Jemand ne Idee?
-
Du hast recht Grua. Es ist alles Frequenz nicht Zeit. Hab den mein Post bearbeitet. Passt nun.
-
@Bosst zu den günstigen Versionen kann Wildstyler was sagen. Das ging eigentlich problemlos. Ich persönlich kaufe immer die Originalen da ich die Platform super finde und die Preise immer noch sehr vertrehtbar. Ausserdem sind die getestet. Aber wie gesagt, die günstigen funktionieren auch.
-
@gs-gani Guten Morgen. Der Arduino hat zwei Einstellungen einmal den COMlevel und die Größe des Ringspeichers. Der COMLevel gibt an wie oft der timer1 (mit 1024 Prescaler) überlaufen muss damit Daten an den PC geschickt werden. Der steht momentan auf 1. Das bedeutet das bei jedem Überlaufen des Timer1 (ich glaube 8Bit also 256) Daten an den PC gesendet werden. Das funktioniert ganz gut. Durch ändern des Prescalers könnte man das aber noch deutlich beschleunigen. Die Zeit zwischen zwei Datadumps (Daten an den PC) siehst du in zweiten Eintrag auf der Com Schnittstelle. Gerade sollten das so 50-60Hz sein. Der Ringspeicher hat momentan 50 Einträge, um erlich zu sein haben wir das nie geändert, da das immer gut funktionierte. Vielleicht nochmal etwas genauer zum Arduino. Der sendet Counter ; Frequenz zwischen zwei Datadumps ; Frequenz Kanal1 ; Frequenz Kanal2 Der Counter wird im Programm als Plausibilisierung benutzt und die Zeit natürlich zum Berechnen der Leistung. Das mit dem Schließen der COM Schnittstelle muss ich mir nochmal anschauen. Es kann sein das in unserer Weihnachtstestmadness etwas verlohren gegeangen ist. Ich schaue es mir morgen nochmal an.
-
Das kann ich erst sagen wenn das fertig entwickelt ist. Bitte beachte auch das des wahrscheinlich mehrere Versionen des Shields geben wird. Die ersten Versionen werden bestimmt noch weiter entwickelt. Nur das euch das klar ist. Kosten denke ich so ca. 10-20€.
-
Hallo SMarco. Du benötigst einen Arduino (Genuido) MEGA 2580 oder ein Vergleichbares China Modell. Wenn ihr gleich loslegen wollt, braucht ihr sonst nichts mehr. Was ich aber empfehle ist ein paar optokoppler zwischen Minimal und Arduino. Ich habe einen LTV827. Zusätzlich noch 2x 10kOhm und 2x X Ohm um den Strom der Rolle und Zündung auf 50mA zu begrenzen. Bei der Minimal mit 5V sind das dann glaube ich 180 Ohm. Rollensensor dann bitte mit U=RI ausrechnen. Möglichkeit zwei wäre, ihr wartet noch ne Woche oder so und dann kann ich euch für die Materialkosten ein komplettes Schield für den MEGA ätzen. Da wäre dann alles drauf. Optokoppler, Minimalkartschaltung, BME 280 und Anschlüsse für Lambda und Thermoelement.
-
Zur Hardware. Ich habe gerade in Eagle angefangen eine Shield für den MEGA zu entwerfen. Dort soll dann sowohl die Minimalkartschaltung zur Rechtecksignal Erzeugung als auch alle Optokoppler und I2C Verbindungen drauf (BME280). Sensorstromversorgung soll auch integriert werden. Es wäre gut wenn mögliche Interessenten ihre benötigten Spannungen posten würden. Geplant sind bis jetzt: 5V 9V 12V Da ich in Eagle noch nicht wirklich fit bin wird das aber noch etwas dauern. Hilfe ist willkommen ;).