EinHexenmeister
Members
-
Benutzer seit
-
Letzter Besuch
-
eigentlich haett ich noch eine einfache frage. in welchen VE bereichen ist eine A/N VE map am schwierigsten sie richtig hin zu bekommen, niedrig leistungsbereich, standgas, kleinen drosselklappenstellungen, mehr im oberen drehzahlbereich, etc. welche bereiche bereiten die groesten probleme und muessen am meisten nachjustiert werden, sind am empfindlichsten fuer aenderungen am motor, etc ... gibt's da faustregeln dafuer. Cheers Klaus
-
vielen dank fuer die beitraege. sehr erschaulich sind die diagramme von "Tim Ey" (bei WOT wide open throttle) die ganze welligkeit deutet fuer mich auf ein resonanzverhalten bei 7900 rpm hin, aber es ist super bei dieser drehzahl noch so schoen aufloesende druck ergebnisse zu bekommen. die welligkeit ueber 30 grad (632 us fuer 30 grad bei 6900 rpm). manche der pulse sind bestenfalls 10 grad lang (200 us) und als dezitierter puls erkennbar. also muszte es eine messpunktfolge von sag'ma alle 20 - 30 us geben. naja die meisten 32-bit rechner und adc-wandler haben damit kein problem, aber der uebliche eigentlich scnelle MAP sensor kann da mit 1 ms response time nicht mehr mithalten. ich moechte eigentlich die MAP druecke meist von standgas und bis zum mittleren bereich fuer die berechnung erfaszen, da ja der ansaugdruck bei fast vollast dem luftdruck sehr aenlich sein sollte und bei WOT dabei wahrscheinlich fast immer pro cyklus volles gemisch eingepsritzt wird. ich moechte von grund auf einer handfesten bemessungs groesze fuer den meisten bereich fuer die VE tabelle grundwerte haben und diese dann im kleinen auf den spezifischen motor fein-tunen. nur so meine ueberlegung. nun zu : "2.wie erfinde ich eine neue motorsteuerung und entwickle dazu die hard- und software." bestimmt eine gute idee aber eigentlich mollte ich anfaenglich nur wissen ob mein gedanke mit der kurbel-winkel spezifischen MAP erfassung als bemessungsgroesze fuer eine basis VE tabelle einen sinn ergaebe. und nun ein zuckerl fuer die software elektronik liebhaber die glauben das man von groszen firmen wie NXP (Philips), Freescale (Motorola), infineon (Siemens), etc technische kundenunterstuetzung bei problemen mit ihren chips bekommt, hier ist ein link meines ADC problems https://community.nxp.com/t5/LPC-Microcontrollers/LPC54114-erroneous-ADC-mid-range-reading-from-sample-app/m-p/1537382#M50401 beide hilfsbeitraege waren vieleicht gut gemeint, aber die haben entweder meine erste problem beschreibung nicht gelesen oder nicht verstanden ... das ist einer der gruende warum der Arduino so einen groszen anhaengerkreis hat, leider ist der Arduino atmega chip ein mopedmotor obwohls fuer den gleichen preis aufgeladene 2 liter motore mit 250 ps gibt. cheers Klaus
-
milchmaedchen-theorie : annahme von ansaugrohr volumen als kleinster ausgleichskammer, kurzer abstand von drosselplappe zu einlass in den motor. ansaugrohr volumen < hubvolumen des motors, welchem zufolge es fast keine ausgleichs eigenschaften hat. somit ausgleichsvolumen bezogene druckmess zeit-integration vernachlaessigbar klein. das dynamische gasflusz geschwingigkeits verhalten sowie die angesaugte gasmenge und der gasdruck im ansaugrohr waehrend des ansaugvorganges ist der kolbengeschwindigkeit annaehernd gleichzusetzen. welche von der pleuellaenge zum hub geometrie verursachte minimale aenderung abgesehen annaehern sinusfoermig sein sollte. meines erachtens gaebe es nun 4 grundlegende stadien und alles integrative dazwischen. 1) gasdruck vor oeffnung des ansaugvorganges von welchem aus die fuellung des zylinders im punkt 2 beginnt. dieser ist der druck der besteht nachdem die teils geoeffnete drosselklappe einen druckausgleich zwischen ansaug volumen und auszendruck waehrend des letzten 3 x 180 grad kurbel winkels vollzogen hat. 2) ersten 30 grad des kolbens von OT nach unten. kolben wird langsam schneller und die einlassoeffnung groeszer. kein allzu groszer angenommener druckabfall derzeit dank der langsameren kolbengeschwindigkeit und des dadurch kleinem freigewordenen hubvolumens. 3) kolben erreicht waehrend der naechsten 120 grad maximale geschwindigkeit bei 90 grad und endet bei 150 grad mit der gleichen geschwindigkeit wie bei 30 grad. in diesem zeitraum wird das groeszte hubvolumen frei und (teils) gefuellt und es wird der hoechste gasflusz erzielt. dies resultiert in einem maximalen ansugrohr druckverlust (niedriger absolut druck), welcher mesztechnisch erfaszt werden sollte. ich wuerde diesen max druckunterschied als einen referenzwert fuer den fuellungsgrad benuetzen. 4) kolbengeschwindigkeit erreicht 0 nach weitern 30 grad kurbelwinkel und die einlaszoeffnungen werden kleiner bis fast geschloszen. es ist weiterhin einhoher ansaugrohr druckverlust (niedriger absolut druck) zu verzeichnen da damit dieser zyklus begann und die restfuellung geht aus diesen gruenden nicht so effektiv voran wie in phase 2. resultat aus 1 - 4 : phase 2 hat den groeszten einflusz auf die gesamt fuellung und der druck im ansaugrohr waehrend dessen scheint es der wirklich verantwortliche faktor zu sein. dieser druckwert sollte ein maxima in der haelfte nach dem erreichen von 90 grad sein. wenn man nun den integrieten MAP druck dem spitzenwert um 90 - 100 grad nach OT und grenzwerte von 30 bis 150 grad im ansaugzyklus den rest der 720 grad dem gegenueberstellt ergaebe sich ein verhaeltnis von geschaetzt angenommen 5 : 1. luftdruck 1.00 bar, max ansaugdruck 0.50 bar, integrierter ansaugdruck 0.90 bar. ein langes schlaeucherl zum MAP sensor koennte in diesem falle bei der mess integration sehr hilfreich sein. bin mir nicht so sicher ob das 5 : 1 so haelt ... die frage ist wie lange zeit (grad) der spitzenwert und dessen abflachung sich im zeitraum von 720 grad auffinden. wie gesagt, michmaedchen rechnung und keine fluszdynamic abhandlung ... ich mach elektronik und software und schraube auf hobby ebene cheers Klaus
-
s'wird eng mit den MAP sensor messungen hab mir die datenblaetter von gaengigen MAP sensoren angesehen und der "response time" standard scheint bei allen um die 1ms von 10 bis 90 % eines eingangs sprungverhaltens zu liegen kurzes kopfrechenen : 6000 rpm 360 deg 10 ms -> 36 deg 1 ms also so um die 45 bis 60 grad bei 9000 rpm plus da kannst keinen langen duennen schlauch mehr nehmen sondern den sensor so kurz wie moeglich an die "static port" MAP anzapfung dranhaengen. duenne schlauche repraesentieren mit kleiner werdenden dia und steigender laenge einen steigenden widerstand zu schnellen (1 ms) druck und flusz aenderungen und agieren wie ein kondensator der die sensor "response time" wesentlich schwaechen kann. also im oberen drehzahlbereich wird's eng und der sensor bereitet durch seine traegheit schon eine integration des druckes ueber den ansaugzyklus vor. messungen in 200 us abstaenden oder so sollten einen verwertbaren maximalwert erkennen lassen. fuer langsamere drehzahlen sollte alles eigentlich kein daten problem darstellen https://www.utmel.com/blog/categories/sensors/map-sensor-working-structure-and-types https://www.nxp.com/docs/en/data-sheet/MPX4250A.pdf der MAF sensor wird prinzipiell vor der drosselklappe angebracht und ist vom raeumlichen abgesehen mit ansaugtrichtern, etc nicht vereinbar. ferner ergibt er alleine schon durch die anbringung vor der drosselung ein allgemeines integrationsverhalten der luftmenge ueber zeit ohne verbindung zu individuellen ansaugzyklen (ausgenommen offene drosselklappe). diese integration nimmt mit zunehmendem oeffnen der drosselklappe zwar ab aber er ist fuer ansaugtakt synchron messungen ungeeignet und viel zu traege. ich finde den kleinen MAP sensor vom baulichen her in einspurigen fahrzeugen ideal. https://autoditex.com/page/mass-air-flow-sensor-maf-19-1.html https://www.aa1car.com/library/maf_sensors.htm zu "ich bezweifle, dass beim 2 takter (und 4t sportmotoren) mit handelsüblichen automotive map sensor was brauchbares rauskommt" vorweg. hab derzeit leider keine mess erfahrungswerte und sprech nur fuer theorie. jetzt kommt's drauf an ob 1 zylinder oder "mehr-zylinder" mit MAF ausgleichskammer. bei 4 oder mehr zylinder in 4-takt anordnung wird mehr oder weniger rund um die uhr angesaugt und somit sollte der MAP sensor ein annaehernd reales ansaugdruck bild wiederspiegeln. wenn der druck zu sehr dem atmosphaerischen gleicht dann koennt'ma doch annehmen das er seine zylinder proportional dem druck fuellt. dem gegenueber der 1 zylinder 4-takt (baulich ohne MAF ausgleichskammer). man kann sagen das der groszteil der luftmenge so ueber max 120 grad (groeszte luftgeschwindigkeit) oder weniger angesaugt wird, das sind nun 120 oder weniger grad von 720 grad fuer alle 4 takte. also zeitlich gesehen wird 1/6 der zeit gesaugt und 5/6 der zeit wird versucht den ansaugdruck durch die oeffnung der drosselklappe dem auszendruck anzuleichen bis dann wieder 1/6 gesaugt wird. daher koennt'ma annehmen das der wirkliche ansaugdruck waehrend des saugvorganges 5 mal groeszer als der inegriert ueber zeit gemessene ist hoffe ich war wieder mal nicht zu langatmig mit meinen ausfuehrungen cheers Klaus
-
und nun danke fuer Atom007s antwort. Wortschöpfungsgedanke "$HEX-Plaining" ... sehr gut, es fehlt nur noch der noetige wiki beitrag... hab bestimmt nicht's als boese aufgefaszt ... naja dann Prost !!! ich bin mit den worten nicht so gut, war's nie und jetzt schweb ich zwischen englisch und wienerisch herum. wollte mich mit der ganzen elekctronik und firmware nicht wichtig machen nur aufzeigen das beide kasterln "ms" sowie der speeduino meiner meinung nach ueberaltert und ueberfordert sind und leider meist einen gewissen hobbycharakter haben (s'koennt besser sein aber irgerdwie fehlen da und dort die i-tupferln) ... hobby ist schoen und gut, mach'ma alle und die meisten der entwicklungs-aktoere sind super d'rauf und trotzdem fragt man sich warum machen sie die falschen entscheidungen aus meiner sicht gesehen. den atmega hab ich zwangsweise mal benutzt da ich eine wbo2 atmega hw platform hatte und dann testcode fuer den bosch cj125 auf der arduino IDE geschrieben hab ... 1/2 durch's projekt bin ich mit'm RAM am ende gewesen und hab alle meine strings painfully mit typecasting und aehnlichem in's flash exekutierbar untergebracht, es war ein endloser spieszrutenlauf ... ja warum nimmt man dann einen original 8-bit arduino wenn's andere auch gibt ... aus masochistischen gruenden, bitte verzeiht'z meine ausdrucksweise ... hab mich schon wieder verfangen ... hab mich seit 1980 mit intel 8085 und zilog z80 herumgschlagen, der motorla 6805 oder so war anfang 80 das heisze eisen aber heute ist's ein rosthaufen im museum ... schlusz damit, meinte mit meiner motzerei ich habe bitte nicht auf deine stroemungssimulationen angesprochen, denn die sind fuer mein einfaches hw/sw gemuet viel zu komplex ... wuerd mir wuenschen wenn ich das alles im detail folgen koennt jaja die simulation ist schoen graphisch und im inhalt aufschluszreich aber ich wueszt nicht wie ich das selber simuieren koennt "dass es vermutlich schon wichtig ist, wo man den MAP-Sensor plaziert" bei einem ITB mit drosselklappe so um die 80 mm max vom eingang in den motor rein hat man nicht viel spielraum fuer die anbringung des "static port" (anzapfung) fuer die druckmessung ... ich wuerd mich fuer im raum dazwischen entscheiden, denn hinter der drosselklappe gibt's bestimmt keinen ruhigen gasflusz und gleich vor'm kolbenhemd oder flatterventil, drehschieber gilt aehnliches. die frage fuer mich ist, wie flott ist die silizium mebrane und bruecken-elektronik des drucksensor's ... eigentlich nur noch die elektronik, aber kann mir nicht vorstellen das die zu langsam sein koennte ... ja und der sensor kann natuerlich nicht nach einem lange duennen schlauch plaziert sein... musz mal datenblaetter aufsuchen zum speeduino "cycle minimum, cycle average, event average" mueszt ich mich schlau machen ... hab mich mal in's speeduino forum reingeklinkt und wurde auf code abschnitte verwiesen wo die im "main ()" loop den MAP sensor samplen. hab den code aber nicht weiter in die einzelheiten verfolgt (da atmega 8-bit). mir wurde angeraten das es eine gute idee sein koennte und ich versuchen sollte es zu implementieren ... auch nicht machbar da die Teensie 3.5 und 3.6 nicht erhaeltlich sind und es auch schwer ist mother-boards fuer die Teensies aufzutreiben. und warum soll ich mich in was einlesen und alles lernen wo ich zumindest fuer die NXP chips genug erfahrung und meine eigenen peripheral bibliotheken habe und weiters auf meinen eigenen tabellen verarbeitungs code von frueher zurueckgreifen kann. hab das ganze ja schon so um 2005 herum mit dynamisch scalierbaren tabellen fuer eine piggy-back inj mit einem lpc2148 gemacht bin leider wieder mal viel zu weit ausgeschweift ... nochmals vielen dank fuer deine, eure beitraege
-
anfaenglich vielen dank fuer die antworten und ich werd versuchen schritt fuer schritt durchzugehen. ich habe nun wirklich vor mein eigenes einspritzkasterl zu entwickeln und werde mich beim tunerstudio als GUI anhaengen (hoffe die haben nichts dagegen) habe 2000 einen power commander clone (infineon C167CR oder CS) fuer Yoshimura entwickelt der dann dank eines zerwuerfnisses im yoshi tech-mgmt in den mistkuebel gelandet ist ... schon damals wollt ich eine "stand-alone" einspritzung und nicht nur ein dyno-jet piggy-back kasterl ... das problem fuer mich war die erstellung einer VE tabelle basierend auf mathematischen und physikalischen rechenmethoden. einspritzzeiten und sensor daten eines referenzmotors einlesen und weiter vererben kann bald wer (war nur auf das konzept A/N bezogen und nicht's persoenliches) und war fuer mich nicht wirklich zielfuehrend ... erst mein neulicher gedanke von synchron zum kurbelwellenwinkel erfaszten ansaugdruckes als rechengroesze fuer die direkte kraftstoffbemessung hat mich dazu bewogen das ganze wieder aufzuwaermen und dazu braucht man flotte chips. wuszte nicht das es bei der 'ms' abzweigungen vom G+P gegeben hat, danke, hab mir den quellcode runtergeladen ... naja jede menge *.s assembler ISR code, das war damals das uebliche, habs ja selber damals gemacht, gab nichts anderes ... wenn man mal tief in einem produkt drinnen steckt ist's nicht leicht den rechnerchip zu wechseln nochmals vielen dank an gravedigger, sehr informativ. A/N haette heutzutage keine berechtigung mehr sollte mein konzept der echtzeit messungen des anszugdruckes funktionieren und die messergebnisse verwertbar sein ... bitte das ist so mein grundgedanke. ja man kann bestimmt das drehzahl bezogene luftvolumen (fluszgeschwindigkeit) auf den querschnitt einer teilgeoeffnetten drosselklappe und die daraus resultierende angesaugte luftmenge errechnen aber das ist bestimmt kein einfaches verhaeltnis von proportionalitaet ... allein der winkel auf querschnitt ist nicht linear und die restriktion des resultierenden querschnittes ueber der drehzahl auch nicht. der luftdruck hingegen ist direkt proportional zur luftmenge (masse). nur der luftdruck ist nicht immer konstant, ein brauchbarer annaeherungswert (durchschnitt) kann aber mit mehreren messungen waehrend des ansaugvorganges meiner meinung erzielt werden. tut mir leid wenn ich mich immer wieder in einzelheiten verfange, aber ich kann's nicht kuerzer zum ausdruck bringen.
-
bitte, mein beitrag war nicht nur an gravedigger gerichtet sondern an die allgemeinheit von "einspritzung ... greifen wir das an". haette mir erhofft gedanken ueber, auf die im ansaugtakt kurbelwellen winkelabschnitt bezogenen MAP messungen zur genaueren erfassung der luftmenge pro leistungszyklus, zu bekommen. hatte gedacht das jemand mit grundgedanken von gasflussdynamik und sensorik in physik da seinen senf dazu geben koennte ... dachte da auch an "atom 007" und anderen ... ich frag nicht um eine akademische abhandlung, sonder nur ob jemand gedanken dazu hat auszerdem hab ich gefragt ob vieleicht jemand licht ins dunkel der physikalischen oder mathematischen erstellung einer VE tabelle mit A/N einspritzung hatte oder ob die meist prinzipiell von motor zu motor empirisch vererbt werden. wollte ferner aufzeigen das all die 8 und 16-bit implementationen wie "ms" und speeduino zur kurbelwellen winkel spezifischen MAP datenerfassung waherend des ansugvorganges meiner ansicht nicht faehig sind und es wichtig waere den ladezustand des motors per umdrehung zu erfassen ... damit haette man schon von haus aus genauere werte zur krafstroff bemessung ganz speziell in ITB (individual throttle body) implementationen ferner haett ich gehofft das vieleicht jemand mehr info in der datenerfassung und verarbeitung im "ms" oder speeduion haette nun zu gravediggers frage "willst du eine motorsteuerung selbst bauen" "ms" kommt fuer mich nicht in frage da ich alle micros unter 32-bit total in zeiten wie 2022 ablehne und das gilt auch fuer "C" als programmiersprache. "C++ erlaubt einfache modulare "inheritable" designs und "C" mag zwar anfaenglich schneller zu erfolg fuehren, aber ist halt leider nicht so sauber (und neigt mehr zum pfuschen) wie man's in C++ einfach machen kann wollte mich beim speeduino einhaken, aber die micros die akzeptabel sind, sind dank der pandemie und der freundlichen russen in der ukraine fuer das naechste jahr nicht erhaeltlich (Teensie 3.5 / 3.6) nachdem ich kuerzlich die idee mit der winkel spezifischen MAP datenerfassung waehrend des ansaugzyklusses hatte hab ich begonnen mein eigenes sueppchen zu kochen und nur zur info, sowas dauert bis zur fertigstellung einschlieszlich einbau und probe am fahrzeug 6 monate plus 40 plus stunden die woche ... naja es kommt ja der auch in California kuehle winter, heuer schaff ich's nicht mehr nach "OE" ... vorhaben tu ichs und ob ich's durchzieh "wea'ma seg'n" haette mir erhofft ein paar theorie kommentare zu meinen angeschnittenen fragen zu bekommen p.s. vieleicht koennt man beim MAF (hitzedraht) ueber einen leistungszyklus gemessene werte integrieren und ueber einen korrekturfaktor in die kraftstoffmengen berechnung einbeziehen ... das ist aber wieder keine direkt verwendbare meszgroesze und die erfaszung des korrekturfaktors bedeutet langwierige messvorgaenge im versuchsaufbau am laufenden motor oder aehnliches einige MAP messungen drehwinkel synchron waehrend des ansaugtaktes sollten da handfestere direkt verwertbare werte liefern naja, fuer's erste vielen dank fuer's lesen meiner beitraege
-
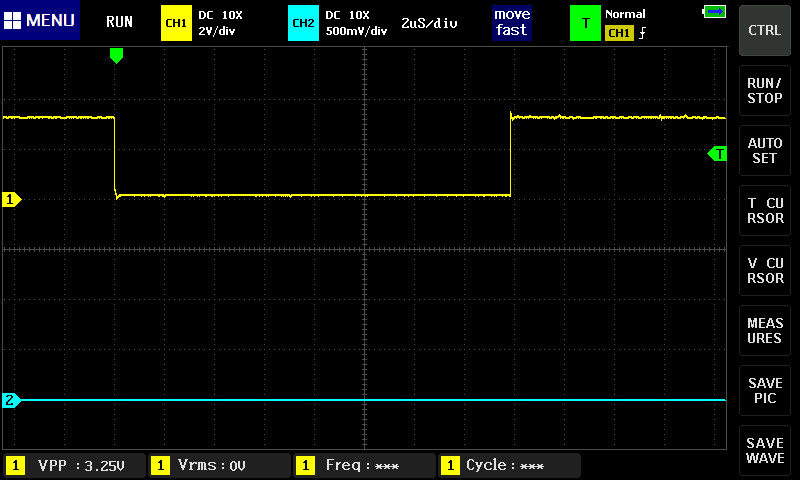
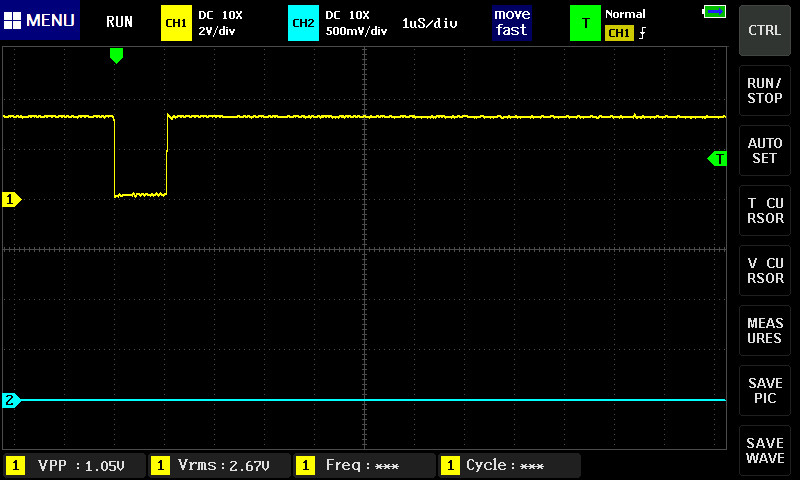
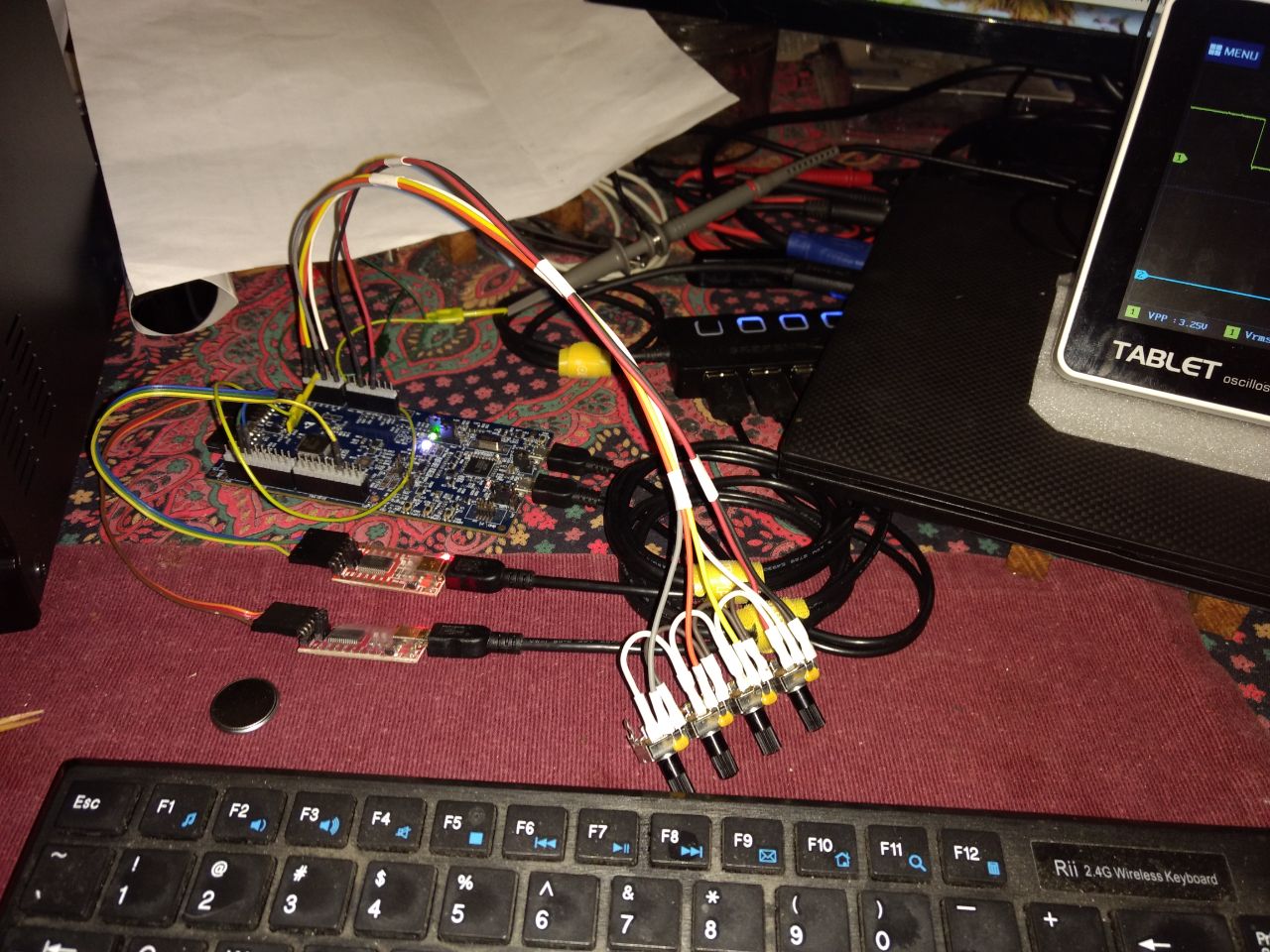
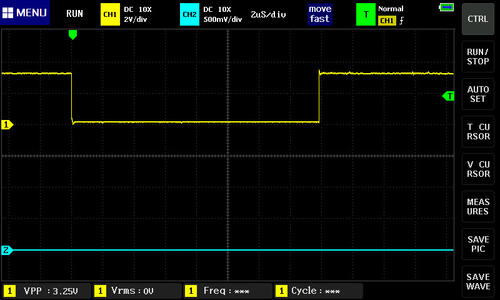
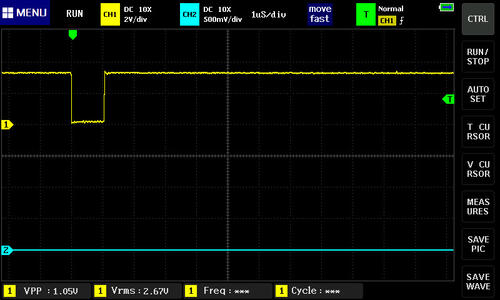
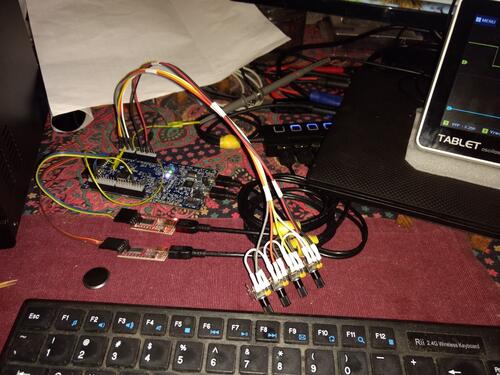
nur um zu zeigen was so ein modernerer microcontroller kann (LPC54114 @ 150 MHz) ... ich hab 2014 bei NXP am LPC1549 er ADC (gleich wie im LPC54114) testing und anderem gearbeitet und die pics sind heute abend vom LPC54114 ... uebrigends das mcuxpresso (gratis eclipse based IDE) von NXP is alles was man so braucht, es musz nicht immer arduino sein. adc_cvt.jpg 16 us adc conversions zeit fuer 5 kanaele mit 5 MHz adc clock (max waere 80 MHz aber durch katastrophalen crosstalk zwischen vorher gescannten kanal und aktiven kanal erst ab 5 MHz oder weniger etwas brauchbar, naja man kann doch mit 16 us leben ohne cpu rechen-zeit, oder adc_isr.jpg 1 us (1 millionstel sekunde) cpu rechenzeit fuer die adc daten lesen und speichern ISR (interrupt service routine) ... musz zugeben das die 1 us bestimmt auf 2 oder 3 us ausgedehnt wird, da noch etwas datenaufbereitung fehlt. dann noch mein bescheidener setup. NXP OM13089 LPC54114 eval board (bestimmt nicht das neueste aber ich steh auf die cortex arm M4F / M0P master slave kern kombo) ... sollte so $ 40 oder so sein (farnell, reichelt, rc-component, mouser, etc ... und ein 100MHz $ 150 tablet osci es gibt natuerlich auch die kinetics familie von freescale, aber die kenn ich nicht so gut wie die NXP chips ... prinzipiell sind alle arm cortex cpus fast gleich, einer ist flotter der andere weniger und es kommt immer auf die periphaeren on-chip bauelemente and, da hat dann so ein chip handbuch mal zwischen 600 und 1000 seiten, naja man musz ja nicht alles kennen, nur das was man verwendet. es musz nicht immer ein arduino mit seinen sketches (*.h, *.cpp module) sein und das ist der ganze ADC scan ISR code mit einer laufzeit von 1 us (ich gebs zu, etwas schwerer zum lesen) /* ---------------------------------------------------------------------------- - */ //#define ISR_TIME(x, y) #define ISR_TIME(x, y) LedSet(x, y) void TAdc::Isr0 (void) { uint i = 0 ; Dat_t *p = pDat ; const char *pw = cA0Wgt ; for (volatile uint **pd = (volatile uint **) cA0Cha, **qd = &pd [eA0AChaMax] ; pd < qd ; pd++, pw++, p++, i++) { uint dat = **pd ; if (!(dat & 1 << 31)) Err |= 1 << i ; dat = (dat & 0xfff0) >> 4 ; p->Raw = dat ; if (p->Ena & eOn) { //hier fehlt noch einiges } } } /* ---------------------------------------------------------------------------- - */ void TAdc::IsrA (void) { ISR_TIME (::eLed1, ::eLedOff) ; /* meas isr timing */ //ISR_TIME (::eLed1, ::eLedOn) ; /* meas isr timing */ uint pend = FlagGet () ; if (pend & ADC_FLAGS_SEQA_INT_MASK) { Isr0 () ; AdcF = true ; } else Pend = pend ; /* log spurious pend */ FlagClr (pend) ; SDK_ISR_EXIT_BARRIER ; //ISR_TIME (::eLed1, ::eLedOff) ; /* meas isr timing */ }
-
und nun zu den punkten : ich hab bis jetzt nirgendwo info ueber die erstellung (mathematische berechnung) einer A/N (alpha drosselklappen winkel ueber N drehzahl) einspritzungs VE tabelle gefunden ... ist das alles empirisch von einem ur-motor abgenommen und dann auf weitere motore mit VE korrekturen weitervererbt ??? oder gibt's darueber rechen-methoden dann gibt's das "Speed Density" (kenn die deutsche bezeichnung leider nicht) konzept wo man die angesaugte luftmenge mesztechnisch erfaszt und dann rechnerisch die einspritz kraftstoffmenge ermittelt MAP sensor fuer den ansaugdruck-absolut welchem die kraftstoffmenge gegengerechnt wird oder MAF sensor fuer die gemessene luftfluszmenge die technologie der sensoren is dabei nicht so wichtig und das war's dann auch schon nun, egal ob 2 oder 4 takt, der luftstrom ist leider nicht kontinuierlich und konstant, sowie die messgeber (sensoren) koennen nicht die luftmenge oder den luftdruck waehren dies dynamischen ansaugvorganges auf 4 oder 2 takte bemessen ermitteln beim mehrzylinder motor mit einer gemeinsamen drosselklappe hat man's leichter da bei einem 4 zylinder 4 takt motor alle 180 grad kurbelwellendrehung angesaugt wird ... naja so um die totpunkte herum wird nicht gesaugt, aber man kann mit hilfe einer "plenum chamber" ausgleichskammer (groszer behaelter zwischen den einzelnen ansaugrohren und der drosselklappe) eine flusz oder druck beruhigung erzielen und somit akzeptable meszwerte erlangen. diese ausgleichskammer kann man einem filterkondensator in elektrik gleichsetzen naja das ist schoen und gut, aber das "hamma leida net" beim einzylinder oder ITBs (individual throttle body) und nun komm ich zum punkt wo ich gerne eure meinung hoeren moechte kurbelwellenwinkel bezogene fluszmengen scheinen auf grund der traegheit der MAF fuszmesser nicht realisierbar zu sein ansaugdruck (vakuum) sollte aber sehr wohl in echtzeit erfassbar sein OT 30 60 90 120 150 UT auf 4 takt bezogen koennt'ma annehmen das bei 30 und 150 grad schon oder noch immer ein meszbarer ansaugdruck vorhanden ist bei 60, 90, 120 grad sollten die werte genau genug sein um sie fuer die einspritzmengenberechnung zu verwenden ... auszerdem gibts eine VE korrektur tabelle die nun auf ermessenen ansaugmengen basiert nun ein paar zahlen 12000 RPM 360 deg 5.0 ms 200 Hz 12000 RPM 180 deg 2.5 ms 400 Hz 12000 RPM 30 deg 0.4 ms 2.5 kHz 36 schwungrad zaehne 12000 RPM 10 deg 139 us 7.2 kHz 24 schwungrad zaehne 12000 RPM 15 deg 208 us 4.8 kHz das waeren so diverse lauzeiten zum abschaetzen der sensorik und echtzeit erfassung von rechenvorgaengen also mit einem LPC54114 von NXP (dual core arm cortex M4F und M0P @ 150 MHz) kann man 5 aufeinanderfolgend gescannte akzeptable analog signale in 16 us mesz-zeit (nicht cpu rechen-zeit) erhalten. vergisz das datenblatt von wegen 5.0 msps (mega samples per second), da gibt's einen crosstalk zwischen den kanaelen der das meszergebnis absolut nutzlos macht. wenn man jetzt den start der ADC conversion mit den allgemeinen ADC kanaelen einerseits auf einen timer so alle 5 ms legt und den MAP sensor ADC start auf zahn 60, 90, 120 grad ansaug takt legt dann sollte man doch im mittelwert der 3 messwerte (30, 90, 120) eine brauchbare echtzeit repraesentanz des ansaug-vakuums (druckes) haben und damit rechnen koennen ferner kann man die (60, 90, 120) mess-erfassung 3 x mit 16 us pro messung wiederholen und dann diese meszergebnis als mittelwert nehmen jaja dann kommt die annahme das man bei leicht geoeffneter drosselklappe kein vakuum mehr messen kann, dann ist doch klar das man da einfach ohne vakuum eine volle fuellung bekommt ... das nicht oder fast-kein vakuum messen ist beim 4 takter sehr leicht erklaerbar, es wird nur waehrend sagma mal 120 grad aus 720 grad gesaugt und fuer 5 6tel der zeit wird der druck im ansaugrohr bei leicht geoeffneter drosselklappe wieder ausgeglichen ist es hierbei etwas mehr anschaulich das ein 16MHz atmega speeduino voellig ueberforderd waere ihr seid nun die megasquirt und speeduino experten denn ich hab mich da nie so richtig eingelesen was gaebe es zu meinen ausfuehrungen nun zu kommentieren bitte, ich bitte darum
-
ich flieg immer wieder beim editieren raus und musz erst das ganze extern editieren und dann posten, kann altes wie's scheint nicht mehr loeschen konnte wie's scheint das vorherige korrigieren konstruktiveres folgt
-
bin mir nicht ganz sicher ob ich hier richtig bin aber ich haett ein paar fragen zu DIY einspritzelektronik ... hab eure beitraege seit dem thema Speeduiono gelesen. es gibt da 2 systeme und ich finde beide sehr schwach von der wahl der cpu aus gesehen. die "ms" (megasquirt) begann vor jahren mit einem 8-bit motorola chip und einer drosselklappen einspritzung (elektronischer vergaser) ohne synchronisation zur motorumdrehung. spaeter wurde sie auf port-injection erweitert und vieles mehr mit sogar einem 16-bit chip von motorola (heute freescale) ... bin aber nicht wirklich auf dem letzten stand. dann sah ich vor jahren den Speeduino und hatte hoffnung da die arduino IDE prinzipiell C++ unterstuetzt und es auch 32-bit arduino boards gibt. aber leider wurde anfangs wieder nur ein 8-bit atmega als bevorzugte cpu verwendet. dann kamen die erweiterungen, ein 32-bit arduino board mit STM32xx aber die am chip perphaeren module waren nicht ideal und dann die hoffnung : Teensy 3.5, freescale 32-bit arm cortex M4F @ 120MHz, 5V tolerante eingaenge. dies waere der ideale chip gewesen !!! Teensy 3.6, freescale 32-bit arm cortex M4F @ 180MHz. leider ist KEINES dieser boards derzeit erhaeltlich und bestimmt auch nicht wie's aussieht "FUER 2023" Teensy 4.0, freescale 32-bit arm cortex M7 @ 600MHz, bitte wer braucht 600MHz, aber nur 10-bit ADC, eher schwach, sollte reichen Teensy 4.1, freescale 32-bit arm cortex M7 @ 600MHz, gleich einschraenkungen wie beim 4.0. das wenige was ich im Speeduino forum mitbekommen hab ist das derzeit die 600MHz firmware versionen gelegentlich abstuerzen, also vergess'ma's vorlaeufig ja und dann gibt's die ganzen "raspberry-pies" und deren linux derivaten ... fuer bertiebssysteme wie linux echt super, aber fuer echtzeit rechnen total ungeeignet das ist mein ueberblick ueber die derzeitige DIY szene noch ein kurzer nachsatz, ich mach seit 30 plus jahren embedded firmware und hardware design und bin es leid mich in 2022 mit 8-bit hobby cpus herumzuschlagen, speziell wenns um "Echtzeit Rechnen" geht. der arduino ist super und die IDE auch sehr gut aber bitte nicht mit antiquierten 20 jahre alten bauteilen ... ich kenn keinen der zu hause noch eine pertoleumlampen bleuechtung benuetzt, es sei denn es gibt einen stromausfall ... bitte seid nicht allzu sauer ueber meine weise dinge aus meinem bickwinkel so zu beschreiben der naechste beitrag sollte konstruktiver werden