Sebastian G
Members
-
Benutzer seit
-
Letzter Besuch
Alle Inhalte von Sebastian G
-
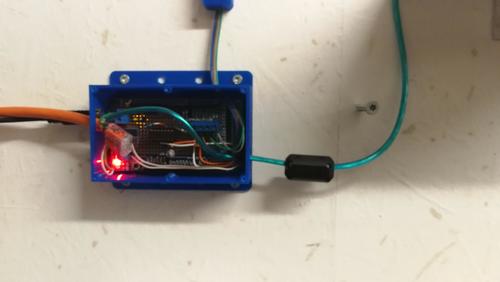
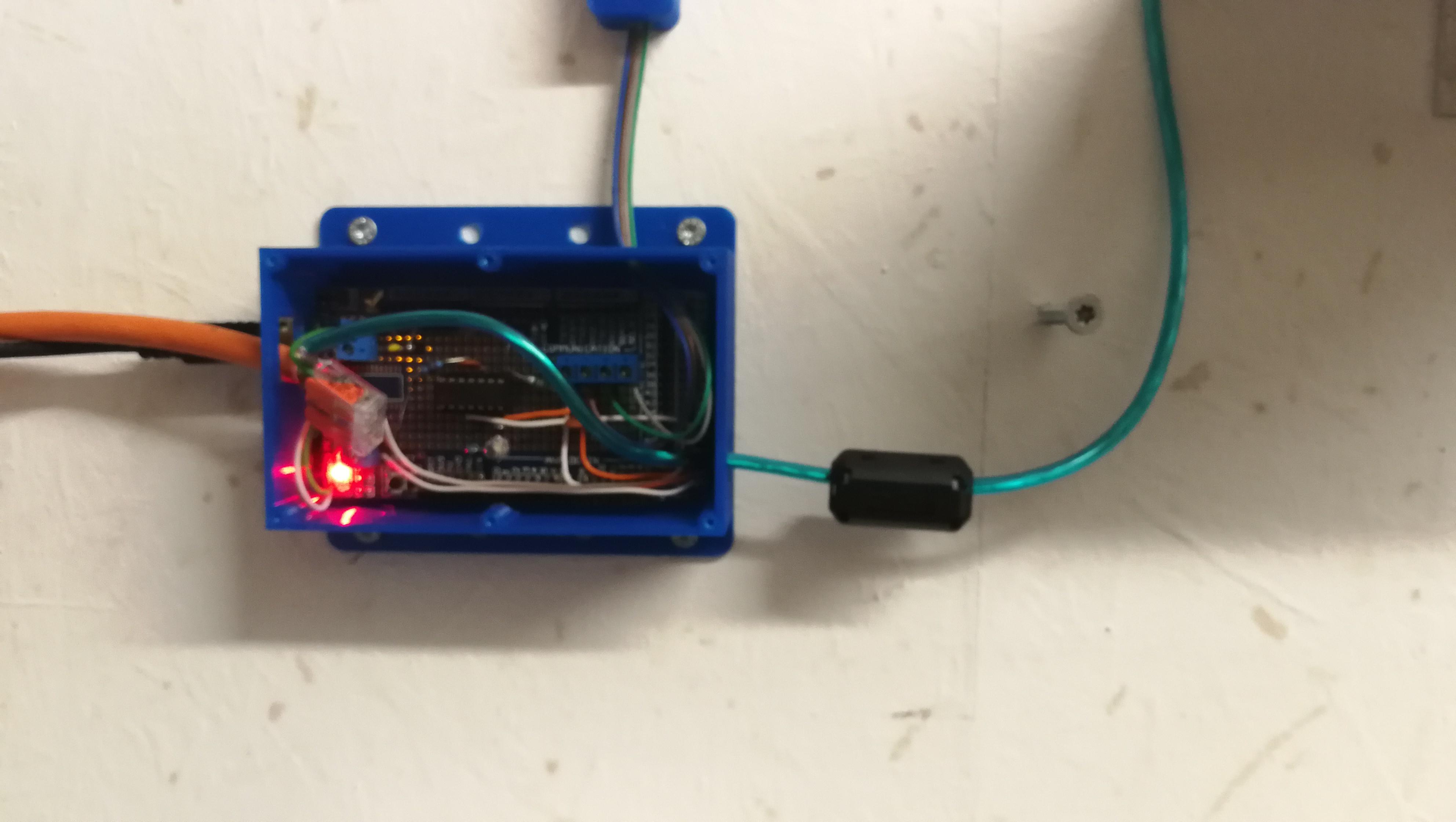
So sehr viel verschiedens hab ich ja noch garnicht getestet, das ganze läuft ja erst seit gestern. Hatte bisher zwei Mopeds drauf, beide mit elektronischen Zündungen, Kerzenstecker mit Widerstand und jeweils einfache Kerze ohne Widerstand. Gestern ist beim Einmessen vereinzelt Eingefroren und bei der Messung sag ich mal 70% Eingefroren wenn ich die Triggerzange zur Messung dran gelassen habe, ohne war Messen immer möglich. Dabei gab es aber nie undeutliche Signale oder so, wenn dann ist es eingefroren, ansonsten waren es immer sehr saubere Signale. Heute früh dann denn Ferrit auf das Zündsignalkabel gemacht und danach ist es nur noch einmal eingefroren ansonsten war sowohl einmessen als die eigentliche Messung mit Triggerzange am Kabel möglich. Morgen fang ich an das Rennmoped aufs nächste Rennen vorzubereiten, das wäre dann Programmierbare Ignitech mit Widerstand im Stecker und Kerze ohne. Da könnte ich auch mal Testweise einen Drehzahlbegrenzer Programmieren um zu sehen ob die Drehzahlanzeige im Labview die selben Daten liefert. Grüße
-
Hallo Jawohl genau das ist der Klappferrit, war nur ein schnellversuch heute morgen aber mit viel erfolg, hätte ich nicht gedacht. Bei GSF habe ich anfangs mit der Minimal Schaltung beide Signale eingemessen, in letzter Zeit aber direkt mit Drehzahlmesser. Sprich ich habe einen Drehzahlmesser an meiner Prüftstandrolle, bringe diese auf 1000U/min in dem Gang in dem ich messen will und lese zu diesem Zeitpunkt die Motordrehzahl auf einem Digitalen KTM Drehzahlmesser ab, aus dem Verhältnis habe ich sofort die Gesamtübersetzung von Motor zu Rolle sehr genau ohne Reifen oder Getriebe daten eingeben zu müssen. Ja der P4 macht das genau so, am Anfang übersetzung einmessen und diese dann für die weiteren Läufe beibehalten. Einmessen habe ich von 3000 bis 6000 U/min probiert, Drehzahl bleibt dabei gleich. Das Rollensignal und die daraus erechnete Geschwindigkeit im Labview stimmen auch sehr genau mit dem Überein was der Tacho an meinem Prüftsnd anzeigt, abweichung etwa 1 Km/h. Grüße
-
Hier hatte ich ähnliches gesehen, Drehzahlabweichung wie bei mir etwa 300U/min
-
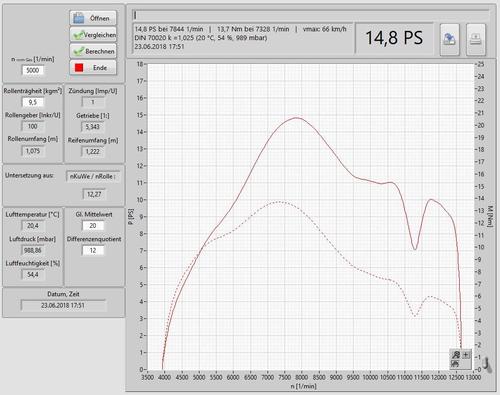
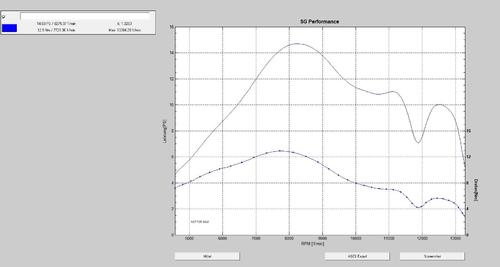
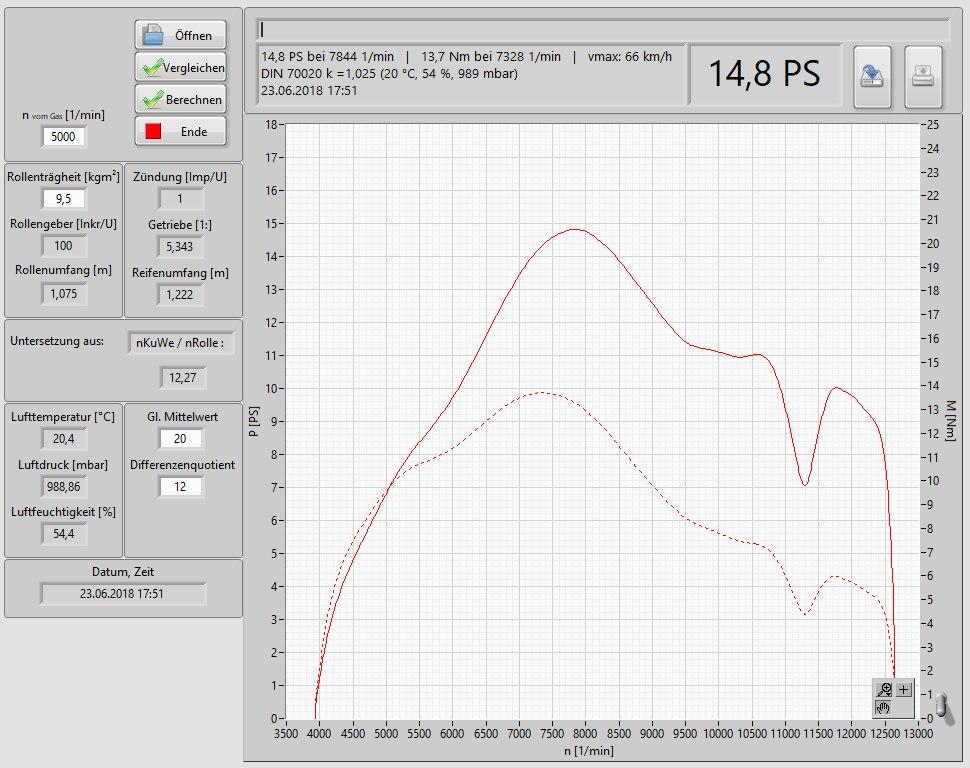
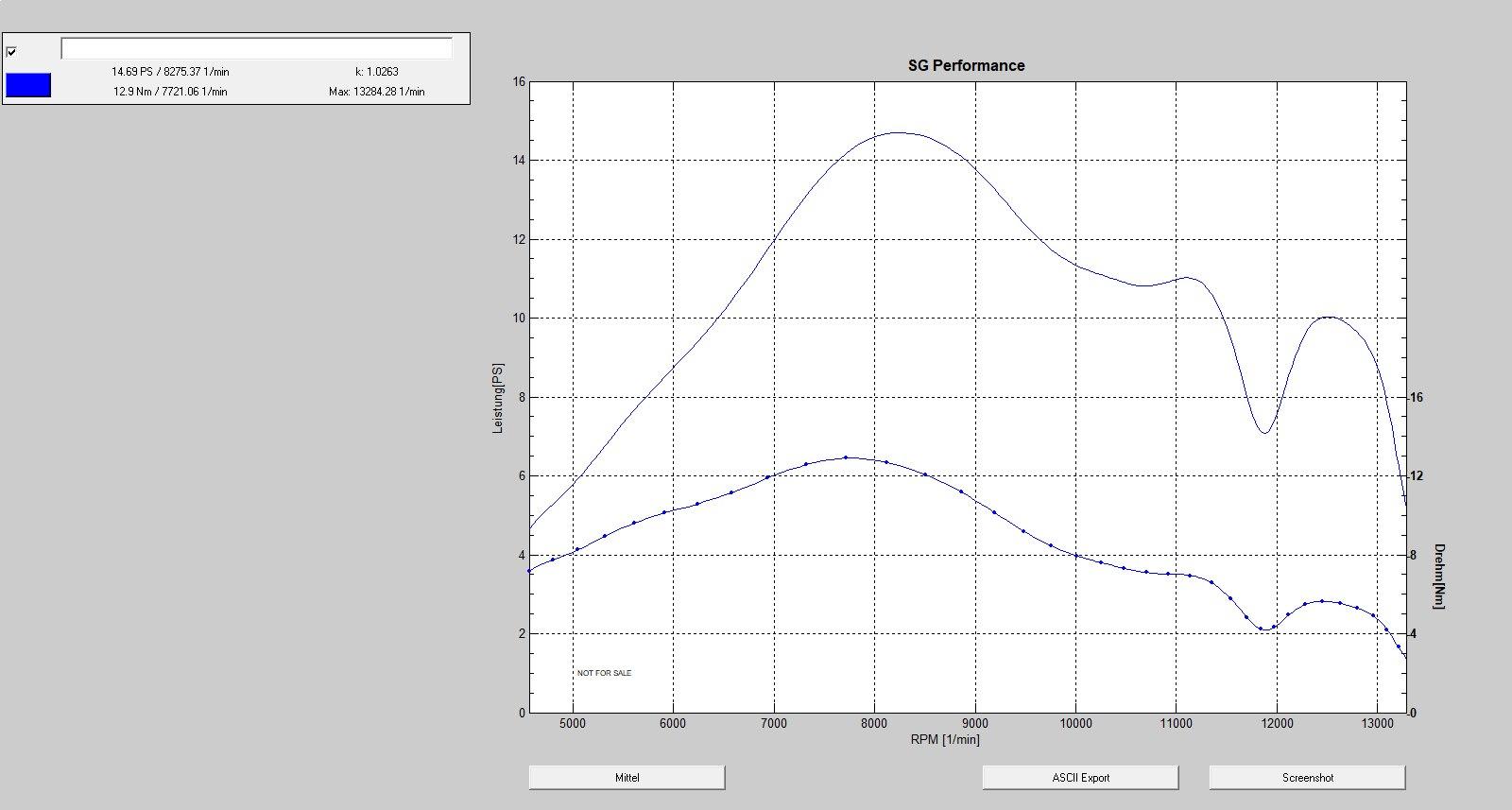
Hallo Vorab, ich finde das Projekt sehr Interessant und Hut ab vor eurer Leistung. Hab meinen Prüftstand schon einige Jahre und war mit GSF Dyno eigentlich soweit zufrieden. Hab mir nun aus Neugierde auch eine Platine aufgebaut um Parallel das neue System zu testen. Soweit ist die Bedienung und der Messablauf schon ein deutlicher Schritt nach vorne und ich bin schon sehr begeistert. Anfängliche Probleme mit Einfrieren des Arduino konnte ich durch eine ordentliche Abschirmung aller Kabel und Schlussentlich mit einem Klappferrit auf das Zündsignalkabel eliminieren. Jetzt laufen die Messung soweit störungsfrei das ich mich ans Abgleichen gemacht habe, unten mal zwei Diagramme von ein und dem selben Prüfstandlauf, parallel von GSF und der neuen Software aufgezeichnet. Dabei zeigt sich das der Bandverlauf schön Deckungsgleich ausgeben wird aber die Eingemessene Drehzahl aber leider um einiges Tiefer liegt als bei Gsf Dyno. Dazu wäre noch zu sagen das der Motor auf einem P4 das selbe Drehzahlniveau wie bei Gsf Dyno hat, das Diagramm muss ich aber erstmal raussuchen. Hab hier im Thema schon gelesen das sich bei anderen Ähnliche Abweichungen gezeigt haben, woran könnte das evtl. liegen? Gibt es Möglichkeiten das Anzupassen? Grüße